GNSSAugmentation System and Technology
Abstract:
Accuracy, Continuity, Availability and Integrity are major technical specifications used to evaluate theability of GNSS system services and the performance of user equipments. Accuracy describes the precision of positionand time. Integrity is the measure of trust that can be placed on thecorrectness of the navigation system output. Basic GNSS systems such as GPS,GLONASS and BDS are not adequate to meet the accuracy and integrityrequirements for some special applications as aircraft navigation, marinenavigation, law enforcement in transportation, etc. Therefore, augmentationsystems were designed for enhancement of the accuracy and integrity. Typicalaugmentation systems to support GPS are SBAS, GBAS and RBN-DGPS system.Chinais alsodesigning its Ground-Based Augmentation System for BDS.
Based onthe analysis of GNSS accuracy and integrity, the factors which affects theaccuracy and integrity was identified. And GNSS augmentation systems andtechnologies were introduced.
Key words:
Positioning accuracy, Differential technology, IntegrityAugmentation.
1 引言
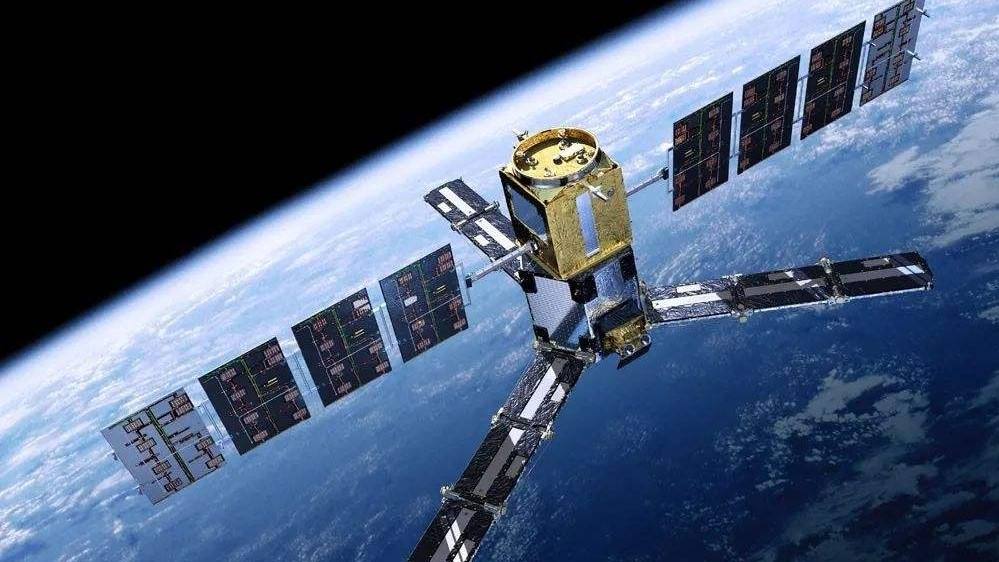
當今已建成的全球衛星導航系統GNSS(Global Navigation Satellite System)包括美國的GPS、俄羅斯的GLONASS、中國的BDS。GNSS技術是無線電導航技術的一種應用,用戶接收機收到衛星發出的導航信號后,通過無線電單向測距手段,獲得衛星信號發射天線與用戶接收機之間的距離,即“偽距”,當用戶接收機同時收到四顆或以上的衛星信號并實現偽距測量后,即可建立并求解導航方程,計算出用戶接收機的三維位置和精確時間。
由于GNSS民用信號可供任何用戶免費使用,且沒有用戶數量限制,因此,該技術被廣泛應用于與位置、速度和時間有關的各個領域,典型的應用領域包括航空導航、航海導航、航天器測控、武器制導、氣象探空、大地測量、位移監測、車輛導航、手持導航、物流跟蹤、通信和電力授時等。
評價一個GNSS系統及其用戶設備的性能,通常使用四個關鍵指標,即精度、連續性、可用性、完好性。不同的應用領域,對這四項指標的要求也不同。GPS系統正式啟用以來,人們在提高其精度方面花了大量精力,并已證明了GNSS的精度可以滿足眾多應用領域的需求。但是,目前市場上使用的GNSS接收機,除個別航空型和航海型專用接收機外,其他領域的接收機基本沒有完好性指標,然而事實上,在許多應用領域使用GNSS,不但對其精度指標有明確要求,同時還要求滿足完好性指標。沒有完好性保障的GNSS技術,只能起輔助作用,無法成為那些涉及到法律、財產、生命安全相關領域的主導航手段。因此,隨著應用的深入,如何增強GNSS的精度和完好性問題,將成為衛星導航應用領域的主要矛盾。
基于作者曾經從事過的航空導航專用LAAS基站設計經驗和增強型WAAS接收機開發經驗,并搜集整理了世界各地過去30多年來在GNSS精度和完好性增強方面所采用的技術和所達到的效果,本文綜述GNSS精度和完好性增強系統和技術,以期對GNSS增強系統設計人員有所幫助。
1.1 利用增強系統,提高GNSS基本系統的精度
以上四個指標中,人們首先關心的是精度,即定位和授時結果的精確度。例如,GPS基本系統的定位精度為10m,授時精度為100ns,GLONASS和BDS系統的精度與GPS相當。該10m定位精度可以滿足大部分用戶的使用要求,但是,對于飛機進場、飛機著陸、船舶進港、船舶靠岸、氣象探空、大地測量、位移監測、交通執法等領域,該定位精度則不能完全滿足應用要求,需要進一步提高;在航天測控、通信授時、相對定位等領域,有些應用場合要求授時精度達到10ns,GNSS基本系統提供的100ns授時精度也不能完全滿足用戶的需求。因此,需要在現有GNSS基本系統基礎上,建設增強系統,輔助提高GNSS基本系統的精度,以滿足特定用戶的需求。
1.2 利用增強系統,提高GNSS系統基本的完好性
GNSS完好性是GNSS定位和授時可信度的度量。不同應用領域對GNSS完好性要求也不同,例如船舶在遠洋航路上航行時,對完好性要求相對較低,依靠GNSS基本系統提供的完好性保障能力,以及用戶接收機內部提供的自主完好性監視能力,即可滿足使用要求。但是,當船舶進港和靠岸時,基本系統提供的完好性指標則無法滿足導航需求,需要建設專門系統,在提高精度的同時,提高GNSS的完好性,保證船舶進港和靠岸的安全。航空導航對完好性的要求高于航海導航,因此,針對航空飛行的全部五個階段,即航路飛行、終端區飛行、進近(指飛機下降時機頭對準跑道飛行的過程)、著陸、地面滑行,都需要在GNSS基本系統的基礎上,建設專門的增強系統,在提高精度的同時,提高其完好性,保證飛行安全。在智能交通領域,當基于GNSS定位結果進行違章罰款時,由于涉及到執法問題,也對GNSS的完好性提出了要求。GNSS授時用于發電、輸電、變電環節的時間同步,為確保電力安全,要求GNSS系統和用戶設備具有較高的完好性。
1.3 GNSS增強系統
實際應用中,往往既要提高GNSS的精度,又要提高其完好性。因此,工程實踐中,GNSS增強系統一般同時具有提高精度和提高完好性雙重作用。例如,美國針對GPS在航空和航海導航中的應用,建設了星基增強系統SBAS(Space-Based Augmentation System)、陸基增強系統GBAS(Ground-Based Augmentation System)和岸基增強系統RBN-DGPS(Radio-Beacon Network- DifferentialGPS),中國針對BDS在大地測量、位移監測、氣象探空、交通管理等領域的應用,正在建設北斗地基增強系統。
1.4 本文內容
本文在分析GNSS精度和完好性指標的基礎上,介紹GNSS增強系統和技術。主要內容包括:GNSS的理想精度和實際精度、GNSS完好性及破壞完好性的因素、保障完好性的途徑。并介紹幾個典型的GPS和BDS增強系統。
2 GNSS的理想精度和實際精度
GNSS系統采用無線電單向測距技術實現高精度三維定位和授時,決定GNSS精度的關鍵因素是單向測距精度。
2.1 GNSS系統的理想精度
通過獲取GNSS信號中測距碼相位的方法,測量衛星到用戶接收機的距離(偽距),進而確定用戶的位置,稱為偽距定位;通過獲取GNSS信號中載波相位的方法,測量衛星到用戶接收機的距離,進而確定用戶的位置,稱為載波相位定位。
偽距定位的精度決定于接收機的偽距測量精度,偽距的測量精度決定于導航衛星測距碼碼元長度。以BDS B1民用信號為例,測距碼的碼速率為2.046MHz,每個碼元長度約0.5us,對應的距離為150m,通過接收電路,測量精度可達到1/100碼元,偽距測量精度約為1.5m,在假設GNSS的幾何精度因子DOP(Dilutionof Precision)為1的條件下,偽距定位的理想精度為1.5m。但是,在GNSS信號的產生、傳播和接收過程中,引入了一些外來誤差,只有減小或消除這些誤差,才可能使偽距定位精度接近其理想精度。
載波相位定位精度決定于接收機的載波相位測量精度,載波相位測量精度決定于導航信號的頻率和波長。BDS B1載波頻率為1561.098MHz,每個周期對應的距離約為0.19m,通過接收電路,測量精度可達到1/100周期,對應的測距精度為1.9mm,這就是載波相位定位的理想精度,該精度比偽距定位精度高763倍,原因在于載波頻率(1561.098 MHz)是測距碼頻率(2.046MHz)的763倍。
然而,實際應用中,在沒有外界輔助增強的情況下,GNSS基本系統的偽距定位精度約為10m,沒有外界輔助的載波相位接收機則無法實現定位。為了使GNSS的實際精度接近其理想精度,過去30多年時間里,衛星導航應用領域的主要力量用于提高GNSS的精度。
2.2 影響GNSS精度的因素
在實際使用中,存在諸多外來誤差,這些誤差直接影響GNSS的定位精度,例如,常見的誤差包括:(1)衛星軌道預測誤差。該誤差與監測站、預測算法、控制站等因素有關,以GPS系統為例,其衛星軌道誤差約為2-3m;(2)星上原子鐘漂移和偏差。該誤差與監測站、預測算法、控制站有關,其數值有時雖然很大,但測控系統通過導航電文將地面估計的時鐘慢變化誤差發送給用戶,因此對用戶來說,時鐘慢變化誤差比較容易處理;(3)星上發射天線相位中心偏差。該誤差與星上天線方向圖有關,衛星設計完成后,該偏差是固定值;(4)電離層傳輸誤差。該誤差與用戶所處的位置和時間有關,隨白天黑夜的交替而變化,同時受太陽黑子活動的影響很大,在太陽黑子穩定期,用戶當地時間下午兩點前后,該誤差最大可達25m左右;(5)對流層傳輸誤差。該誤差與衛星信號路徑上大氣層溫度和濕度有關,可以通過測量用戶所處地面溫度和濕度估計該誤差;(6)相對論效應引起的時鐘頻偏。由于衛星處于高速運動狀態,其重力勢能與地面接收機的重力勢能不相等,從而影響星上原子鐘速率,該影響雖然很小,但對于厘米級或毫米級測量來說,則不可忽視;(7)多路徑誤差。該誤差與星上發射天線、用戶接收天線周圍信號的反射和折射環境有關,對于靜態用戶來說,該誤差項呈現一定的周期性,對于運動中的用戶而言,該誤差不可控;(8)接收天線相位中心偏差。該誤差由天線方向圖決定,可由天線出廠前標定;(9)接收機測量噪聲。該誤差由接收機內的模擬電路和數字電路產生,往往以高斯白噪聲形式出現,一般通過濾波辦法消除;(10)SA的影響。該誤差是人為加入的衛星星歷偏差、時鐘參數偏差和星上振蕩器抖動,GPS系統的SA誤差約為50m(1σ),看似很大,但由于該誤差對于所有的用戶是相同的,可通過簡單的差分手段消除。
2.3 提高GNSS精度的途徑:差分技術
差分技術的實質是通過兩個或多個觀測站同時接收處理導航衛星信號,將各個站點的觀測量集中到一起進行處理,從而消除各站點觀測到的公共的、慢變化的誤差項。典型的誤差主要是衛星軌道誤差、鐘差、空間傳輸誤差。對于多路徑、機內噪聲等誤差,可通過天線、濾波等技術減弱或消除,從而提高GNSS的精度。
不同的差分技術適應不同的應用場合。按照技術分類,分為偽距差分和載波相位差分。按照覆蓋范圍、應用場合等方式劃分,可分為廣域差分、局域差分、星基差分、陸基差分、虛擬差分(連續運行參考站)、靜態差分、相對差分等。
通過偽距差分技術,可以將定位誤差提高到0.5m至3m,即實現米級定位;通過載波相位差分技術,可實現動態厘米級、靜態毫米級定位。應該說,通過差分增強,GNSS精度越來越接近其理想精度。
當前典型的GNSS增強系統有:廣域增強系統,即覆蓋北美的WAAS(Wide Area Augmentation System)、歐洲的EGNOS(European geostationary navigationoverlay service)和日本的MSAS(Multi-FunctionalSatellite Augmentation System);局域增強系統,即陸地機場專用的LAAS(Local Area Augmentation System)和艦載JPALS(Joint Precision Approach and Landing System);全球沿海無線電信標網絡差分系統RBN-DGPS;以及主要用于測繪的連續運行參考站系統CORS(Continuous Operational Reference Systems)。
這些增強系統的主要性能指標見表1。
表1、典型的GNSS增強系統
3 GNSS完好性及其增強技術
GNSS完好性是指當該系統不能提供正常服務時,向用戶及時報告問題,以確保用戶GNSS接收機輸出的正確性和可靠性。完好性是對GNSS可信度的度量。
GNSS系統由空間段、運控段、用戶段組成,加上信號傳播的環境段,構成了GNSS信號生成、傳輸和接收的全過程。在這四個階段中,涉及到信號生成、信號同步、信號發射、衛星軌道測控、衛星時鐘測控、電離層監視、接收天線信號轉換、接收機內部導航解算等眾多環節,任何環節出現問題,都有可能導致GNSS定位授時結果的不可信。GNSS完好性增強技術的本質工作,是及時有效地識別、剔出導致GNSS定位授時結果不可信的各類因素。
GPS系統經歷了1970s年代和1980s年代近20年的試驗驗證之后,于1994年底正式向全球提供全功能的導航定位和授時服務。1995年,斯坦福大學GPS實驗室針對航空導航對GPS精度和完好性要求,開始了GPS增強技術的研究工作,并先后設計了廣域增強系統WAAS和局域增強系統LAAS,并將LAAS技術從陸地機場著陸應用推廣到飛機著艦應用,即后來的JPALS。至今,GPS完好性增強方面已積累了20多年的經驗,因此,本章將以GPS為例,介紹衛星導航完好性方面存在的問題和主要解決辦法。
3.1 GPS基本系統空間段和運控段完好性異常及處理能力
GPS標準服務SPS(Standard Positioning Services)規范中,規定GPS災難性誤導信息HMI(Hazardous Miss-leading Information)發生概率不大于0.002,即每年少于18小時。這些災難性誤導航信息需要及時被檢測到,并通知最終用戶,否則可能發生重大事故[1]。
據不完全統計,2000年到2010年的10年間,發現空間信號完好性異常超過3000次,接近平均每天一次。
針對GPS空間段和運控段發生的完好性異常,GPS基本系統的做法是:由地面運控系統檢測到異常,形成定論和指示信息,把這一指示信息添加到導航電文中,形成新的導航電文,由地面注入到導航衛星,再由導航衛星發送給最終用戶,這一過程一般需要1小時,對于那些與生命、經濟、財產安全的應用領域來說,這個時間太長。
3.2 破壞GPS完好性的其他因素
空間段和運控段發生的完好性異常主要體現在軌道偏差(實際軌道與預測軌道的偏差)、時鐘偏差、姿態偏移等方面。除此之外,信號傳輸段、接收機、信號接收環境等方面,也可能產生完好性異常,例如電離層風暴、用戶設備異常、信號折射和反射引起的多路經、自然電磁干擾或人為電磁干擾、惡意欺騙、接收機內部噪聲等。
3.3 外部完好性增強技術和系統
當前,GPS空間段主用衛星是第二代衛星(GPS-II),由于GPS-II衛星系統研制時完好性增強經驗尚不夠豐富,因此,依靠GPS-II本身的完好性檢測能力不足以滿足用戶的要求。因此,在航空、航海等領域,采用外部增強的方法提高GPS的完好性。例如,針對航空飛行的航路飛行、終端區飛行和一類著陸,建設了WAAS系統;針對進近、二、三類著陸和地面滑行,研制了LAAS系統;針對船舶進港和靠岸,建設了RBN-DGPS系統。
3.4 接收機自主完好性監視技術
由于GPS基本系統的完好性保障能力不足以滿足特定用戶的需求,建設專門的完好性增強系統的代價又較大,接收機自主完好性監視RAIM(Receiver Autonomous IntegrityMonitoring)技術得以發展。針對不同應用場合,人們開發了各種RAIM算法。例如只利用當前測量值進行一致性檢測的“快照法”;同時利用當前測量值和過去測量值的“平均法”或“濾波法”。歸根結底,幾乎所有的RAIM算法都是基于測量值的一致性檢測技術,即利用冗余測量值檢測多個測量值中可能存在的不良信息。
3.5 GPS完好性存在的主要問題和發展趨勢
當前建設的GPS完好性增強系統,適合航空、航海等專業用戶需求。其他應用領域如交通執法、不停車收費、氣象探空、電力授時、高精度位置監視和測量、武器制導等領域,完好性問題還沒有得到徹底解決。
隨著GPS完好性經驗的積累,資料顯示,未來的第三代GPS系統(GPS-III)空間段和運控段的完好性保障能力會提高。
習慣上,GPS領域經常以10年為一個單位談論技術進步。業界普遍認為,上一個十年是GNSS芯片的十年,基于完好性問題的復雜性,下一個10年將是GPS完好性的10年。哪個領域成功解決了完好性問題,GPS就可能成為那個領域的主導航手段。
4 典型的GPS增強系統和技術
針對GPS在航空、航海、測繪等領域應用中存在的精度和完好性問題,美國建設了四個GPS增強系統,即WAAS系統、LAAS系統、RBN-DGPS系統和CORS系統。其中WAAS系統主要用于航空導航的航路飛行、終端區飛行和非精密進近,LAAS系統用于飛機I/II/III類精密進近和著陸,RBN-DGPS系統用于近海船舶導航,CORS系統主要用于高精度測繪。
4.1 GPS廣域增強系統(WAAS)
WAAS系統是針對GPS在航路飛行、終端區飛行和非精密進近階段的航空導航應用而設計的增強系統。通過WAAS系統的增強,使GPS的精度和完好性滿足航空導航這三個階段的性能要求。
目前,北美、歐洲和日本分別建設了本地區的WAAS系統,由于建設國家不同,產生了不同的名稱,北美地區的WAAS稱為WAAS,歐洲的WAAS稱為EGNOS,日本的WAAS稱為MSAS。由于這些增強系統均通過GEO衛星向用戶廣播GPS增強信息,因此也統稱為星基增強系統SBAS。
北美地區的WAAS系統由25個地面監視站、2個地面主控站、3顆GEO衛星和連接地面站的光纖通信網絡組成。WAAS監視站全天候監視GPS星座、GPS信號、以及GPS信號傳輸環境(如電離層和對流層)的變化,WAAS主控站接收處理各監視站的信息,實時生成GPS位置增強數據和完好性增強數據,通過太平洋上空、大西洋上空和美國內陸中部的3顆GEO衛星,向北美地區的所有用戶廣播GPS廣域增強數據。只要安裝了WAAS接收機的用戶即可接收使用,免費且沒有用戶數量限制,因此得到用戶和設備生產廠家的廣泛接受。WAAS系統設計的另一成功之處是采用GPS L1頻率[2]和BPSK調制方式向用戶廣播WAAS增強數據,這樣,WAAS信號和GPS信號可共同使用接收天線和射頻信號處理電路,數字基帶處理電路也大同小異。這樣的系統設計,使WAAS增強型接收機的成本、功耗、體積與普通GPS接收機基本一致,擴大了WAAS的服務領域。
日本的MSAS和歐洲的EGNOS與北美的WAAS工作原理相同,區別在于不同地區的增強系統需要使用該地區的地面監視站和主控站,產生適于該地區的增強信息,并通過該地區上空的GEO衛星向用戶廣播增強信息。
通過WAAS系統的增強,北美地區的GPS精度已由10m(95%)提高到水平3m(95%)垂直3.5m(95%),完好性滿足航空導航規定的要求。WAAS系統已于2003年啟用。
4.2 GPS局域增強系統(LAAS)
飛機在I、II、III類精密進近、著陸和地面滑行階段,對導航精度和完好性提出了更高的要求(完好性異常信息漏報概率不大于5×10-9/15s[3]),GPS基本系統無法滿足該要求,因此設計了LAAS系統,目的是使增強后的GPS系統滿足飛機精密進近要求,使GPS成為以上三個階段航空導航的主導航手段。
LAAS系統由增強基站、偽衛星、甚高頻數傳電臺組成。基站內安裝了3臺GPS接收機,分別接收處理來自3個高性能天線收到的GPS信號,該天線具有穩定的相位中心,且具有多路徑抑制能力。通過一系列算法,計算誤差,識別完好性異常,生成差分數據和完好性監視數據,并通過頻率為108MHz至118MHz的甚高頻數傳電臺(VHF),以31.5kbps的信息速率[3],向機場周圍約45km半球范圍內的飛機提供GPS增強信息。機載LAAS接收機同時接收三種信號,即GPS基本系統信號、LAAS增強數據、和安裝在機場的偽衛星信號,實現0.5m(95%)定位精度[4],并使完好性滿足以上三個階段的要求。到目前為止,LAAS系統的完好性指標尚不能完全滿足民用航空的最高完好性指標,即III類精密進近的完好性要求。但經過改造的LAAS系統可滿足飛機著艦要求,并由此產生了JPALS系統。
4.3 差分GPS無線電信標網(RBN-DGPS)
RBN-DGPS系統是在GPS基本系統的基礎上,利用差分技術,借助海上無線電指向標播發差分修正數據和完好性信息,給海上用戶提供高精度、高可靠的定位和授時服務的助航系統,被廣泛應用于船舶進出港及狹窄水道導航定位、交通安全管理、航標定位、航道測量、航道疏浚、漁業捕撈、海上石油勘探等領域。該系統于2003年底覆蓋全球海岸線,并因此使GPS正式成為國際海事組織認可的船舶導航主導航手段。
RBN-DGPS基站內配備兩臺GPS接收機,分別用于獲取差分信息和完好性信息;兩臺計算機,一臺用于生成GPS差分數據,一臺用于生成GPS完好性數據;一臺無線電信標發射機、以及GNSS接收天線和無線電信標發射天線組成。為保證系統的可靠性,基站內主要設備如GPS接收機、無線電信標發射機采用雙機熱備份工作。RBN-DGPS基站安裝在全球沿海海岸,大致每隔100公里至300公里設置一個基站,基站位置盡可能靠近港口和河流入海口。
RBN-DGPS基站內生成的GPS差分數據(GPS L1偽距差分數據)和GPS完好性數據被調制到283.5~325.0kHz的導航信標頻率上,信息速率為2400bps,調制方式為最小頻移鍵控MSK(Minimum Shift Keying)。該信號通過安裝在約30m高的兩個鐵塔間的全向T型天線發射出去,在無遮擋的海面上,半徑300公里以內的用戶可接收到該信號,陸地上由于受地面雜波的影響,平原地區RBN-DGPS信號作用半徑約在150公里至200公里。
RBN-DGPS系統的技術特點是:用戶與基站距離越近定位精度越高。在用戶距基站50公里左右時,RBN-DGPS接收機的定位精度約為3m(95%);船舶靠岸時,隨著用戶接收機與基站距離的縮短,其定位精度可達0.5m(95%),完全滿足船舶進港和靠岸要求。
由于RBN-DGPS技術已相對成熟,專用的RBN信號接收機的成本和體積也在不斷下降,因此,近年來美國將RBN-DGPS技術擴展到了內陸,并采用低成本單塔架傘形發射天線,為內陸交通運輸、通用航空等用戶提供GPS差分和完好性增強服務,并將系統名稱改為高精度國家差分GPS系統,即HA-NDGPS(High Accuracy National DifferentialGPS),據稱,HA-NDGPS用戶接收機的定位精度已達到0.15m。
4.4 連續運行參考站系統(CORS)
在大地測量、道路設計和施工、GIS數據采集、房屋和橋梁形變監測、地殼形變監測、氣象探空、農機作業等領域,對GPS的定位精度提出了動態厘米級、靜態毫米級要求,GPS基本系統是無法滿足這些要求的,因此需要建設增強系統提高其精度,CORS技術和系統就是為滿足這些應用需求發展起來的。
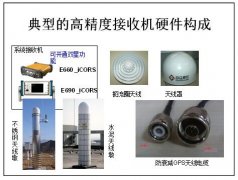
CORS系統由若干個GPS差分基站、一個中心站、和通信鏈路組成。每個差分基站至少有一臺雙頻GPS接收機,將這些基站接收到的衛星原始偽距測量數據、載波相位測量數據送到中心站,中心站根據用戶當前所在的粗略位置,計算出該用戶所處位置的差分矯正數據,包括偽距差分數據和載波相位差分數據,將該差分矯正數據發送給用戶接收機,即可采用載波相位定位技術,實現靜態8-10mm,動態3-5cm的高精度定位。
根據以上工作原理,在CORS系統覆蓋區域內,無論用戶在哪里,中心站都可根據用戶當前所在的粗略位置,為該用戶計算出所需的差分數據,好象在用戶的附近建立了一個臨時虛擬基站,從而保證用戶可以連續地進行高精度定位,避免了用戶不斷切換基站的問題。
CORS系統的工作原理決定了每個用戶需要保持與中心站雙向數據通信,每個基站需要保持與中心站單向數據通信,同時要求每個基站能夠同時提供偽距測量值和載波相位測量值。
5 BDS增強系統和技術
2014年3月,針對北斗系統在各個領域的規模化應用問題,中國開始建設北斗地基增強系統。該系統由全國框架基站、地區加密基站、數據中心站和通信網絡組成。
在全國建設150個框架基站,構成地基增強系統的框架網,框架網覆蓋全國,在框架網的輔助下,使北斗系統在全國范圍內實現米級定位。
在各地區增加區域基站,形成區域加密網,在框架網和區域加密網的輔助下,使北斗系統在該地區達到靜態毫米級、動態厘米級定位。
6 結論
當GNSS被用于與經濟、財產、生命相關的領域時,不但需要增強其精度,還需要增強其完好性,在這些領域,沒有完好性保障的GNSS無法成為主導航手段,只能處于輔助地位。為了在這類領域充分發揮GNSS系統的作用,需要建設相應的增強系統。
解決GNSS完好性問題,涉及到多個信號處理環節、大范圍基站覆蓋、長時間的數據積累和統計分析。同時,試驗驗證GNSS完好性監視模型和算法的正確性和有效性,也要經歷復雜的過程,因此,增強GNSS的完好性將是一件長期的工作。
本文是根據作者本人經歷,并搜集整理世界各地當今所使用的GNSS增強系統和技術整理的,希望對從事相關工作的人員有所幫助,不足之處請批評指正。
參考文獻:
[1] GPS Civil Monitoring Performance Specification, US GlobalPositioning Systems Wing (GPSW),April 30, 2009.
[2] GLOBAL POSITIONING SYSTEM WIDE AREA AUGMENTATION SYSTEM(WAAS) PERFORMANCE STANDARD, 1st Edition 31 October 2008, Technical Operations,Navigation Services, Federal Aviation Administration, 800Independence Ave, S.W, Washington, DC 20591.
[3] Clarce E. Cohen, Boris S. Pervan, H. Stewart Cobb, David G.Lawrence, J. David Powell, and Bradford W. Parkinson, Precision Landing ofAircraft Using Integrity Beacons, Global Positioning System: Theory andApplications, AIAA Volume 164.
[4] International Civil Aviation Organization (ICAO) Annex 10,Volume I (Radio Navigation Aids), “Aeronautical Telecommunications,” FifthEdition, July 1996, Amendment 77, November 2002. The GNSS standards andrecommended practices (SARPs) are contained in Section 3.7.
[5] RTCM RECOMMENDED STANDARDS FORDIFFERENTIAL GNSS SERVICE, Version 2.3, August 20, 2001, RTCM Special Committee No. 104.







 環球新時空
環球新時空 斗室智庫
斗室智庫