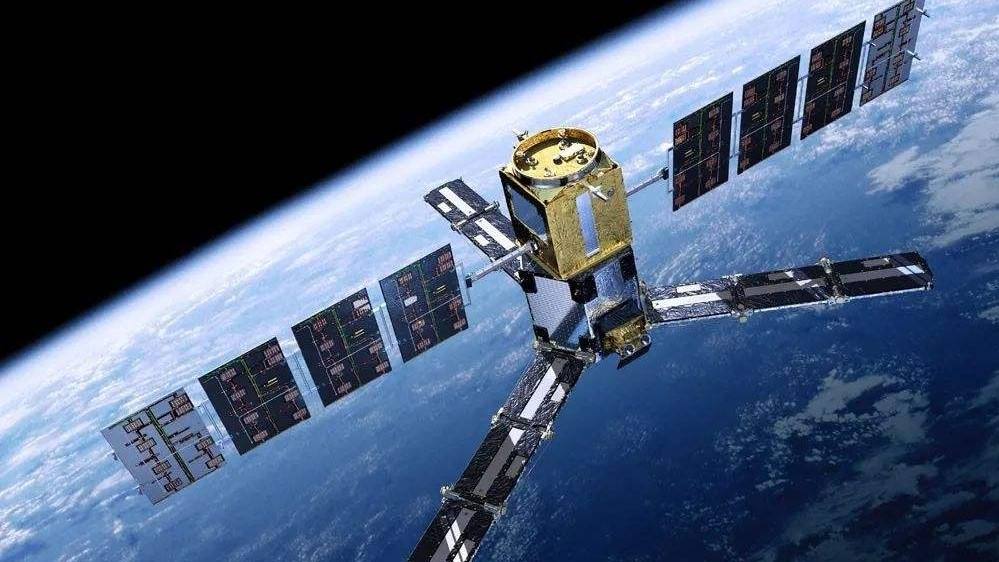
這似乎是個老問題,實際上也是個新問題。因為智能的問題,現在與無人駕駛密切相關,引出一堆新問題。定位系統是服務于智能車輛的,其關鍵作用是實現準確可靠的定位。而智能車輛這樣的智能設備,除開需要對其自身位置具有高度準確的自我感知外,還需要感知圍繞它們的其他智能設備的位置,及其位置相互之間隨著時間的實時動態變化和趨勢,這些對于無人駕駛系統而言,變得越來越重要。而當前面臨的主要形勢是,許多設備還不是智能的,且定位能力也不是足夠的精準可靠。它們通常依賴于單一定位技術(通常是GPS),實際上后者只是GNSS更廣泛的生態系統類型之一。雖然GNSS的兼容互操作,GNSS多系統的協同工作使得這些系統變得更有能力,但仍然有時會受到部署環境和應用場景化的影響,通常是在建筑物內和其他城市峽谷特征干擾信號的城市地區,給定位造成了困難。由此可見,智能車輛的智能,就是重點應對環境傳播效應和應用場景化的影響。
從智能車輛的定位系統而言,首先是考慮多種技術系統的融合解決方案,在復雜惡劣的挑戰環境下,即使在GNSS無法定位的條件下,也能夠實現精準可靠的定位。這就要用到定位融合技術解決方案。從目前來看,比較可行的能夠推進規模化應用服務的解決方案是:GNSS+WiFi+MEMS的組合,是個恰到好處的解決方案。它將全球(絕對定位)、局域(相對定位)和自主定位(泛在定位)融合在一起,而且有強大的應用技術基礎,和無需重大的基礎設施投入與另立山頭的終端研發投入,這是其他技術融合難于做到的,應該是一種阻力最小化的解決方案。
最近有消息報道,GNSS測試解決方案提供商思博倫通信公司(Spirent Communications)已獲得Innovate UK的資助,以利于研究開放傳感器融合。利用WiFi和GNSS傳感器融合的增強型確保定位模擬器(ELWAG),將開發更好的確保定位精度的測試方法。思博倫將與項目合作伙伴,包括華威大學的WMG智能車輛小組,和Chronos技術公司合作開展該項目,該項目將持續18個月。
這些存在干擾風險的城市峽谷地區,由于人口或設備密度的增加,生活在其中的大多數人需要獲得最高精度位置數據。因為WiFi信號幾乎普遍存在于這些場景下,或者說是城市的鬧市區域內,因此有可能將這些信號與GNSS信號“融合”,以便非常準確地識別某些個位置。該項目旨在生成具有代表性且有保障的GNSS+WiFi模擬器,可用于基于實驗室的設備測試和評估,以及性能和操作功能。
在ELWAG項目中,第IV連接性小組發揮了重要作用,在華威大學校園內和周圍的自主車輛場景中,以及當地城市道路網絡上,對WiFi和GNSS信號進行物理層測量。這些測量有助于思博倫開發RF傳播模型,該模型將RF效應覆蓋在其WiFi接入點(AP)模擬器上。然后,WMG智能車輛小組研究人員將圍繞開發的模型執行RF試驗和驗證活動,以提供對其性能的一定程度的保障和確認。
未來自動駕駛汽車的安全性和功能性保障和確認,將成為消費者大量采用的眾多關鍵途徑之一。通過該項目,WMG將為在此測試環境中使用傳感器融合的挑戰提供創新解決方案。此外,由于這是一項技術性很強的項目,因此需要全面了解衛星、基礎設施和車輛之間的信號傳播特性。因此,其研究結果也將影響未來的自主測試方法。對于要開發的混合Wi-Fi和GNSS接收機,制造商需要在效益成本核算上,在可重復和安全的環境中驗證其性能。該項目的目的是開發射頻建模技術,以便在開發實驗室中模擬GNSS和Wi-Fi信號,其質量足以確保制造商的結果準確無誤。
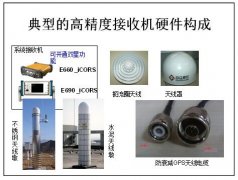
GNSS提供了高精度位置確保的機會,開發人員熱衷于通過利用來自多個傳感器位置信息的“融合”,提供的額外性能,通過始終可用的微機電系統(MEMS)慣性傳感器與GNSS實現精度互補,并且利用具有良好可用性和精度但缺乏完好性的WiFi,使得融合解決方案具有比任何原來的數據源更高的精度、可用性和完好性。
“目前,Wi-Fi接入點(AP)加上GNSS模擬,只能以一種特殊的方式實現,它不允許測試移動車輛、多徑效應、誤差數據和欺騙數據的插入,以及以上提到的所有最重要參數的受控與可重復測試”。思博倫定位業務部工程和產品開發總監馬克霍爾貝勞說。 “在自動駕駛汽車領域,定位精度最高可達5米,從安全角度來看這是不可接受的。通過傳感器融合將精度提高到30厘米將對自主導航產生重大影響”。
華威大學WMG智能車輛小組副教授馬秋修斯博士評論說:“未來自動駕駛汽車的安全性和功能性確保,將成為消費者大規模應用的眾多關鍵途徑之一。通過這個項目,我們將為在這個測試環境中使用傳感器融合的挑戰提供創新的解決方案”。
Chronos技術公司創始人兼董事總經理查爾斯庫利教授評論說:“Chronos很高興成為ELWAG項目的一部分,將我們的專業知識應用于現實世界的WiFi和GNSS的現場環境測試,以及未來移動多模式輸入導航的開發系統”。







 環球新時空
環球新時空 斗室智庫
斗室智庫