偶爾,翻閱前幾年看到的文章,實際上可見,現(xiàn)在有人熱烈炒作的那些東西,不過是炒冷飯而已,而已而已,并不是什么新東西。這是一篇2013年在《Inside GNSS》上發(fā)表的文章。
照相機是個多才多藝的傳感器,它既可以作為定位手段,也可以進行航向推算。新的GNSS信號和系統(tǒng),不僅改進了精度,而且與其它技術的組合提高了抗干擾能力和改進了魯棒性。城市和建筑物的3D圖形,有助于解決鬧市區(qū)域的導航難題,實現(xiàn)肩并肩的協(xié)同定位。可用傳感器爆發(fā)性增長,能夠組合成可靠的行人導向裝置。現(xiàn)代導航已經進入那么多工具集成工作在一起的時代。
為了應對我們時代最偉大的定位挑戰(zhàn),當前許多新的概念形成熱潮。為了實現(xiàn)真正的需求應用,如可靠的行人導航、車道級識別方法,和對抗騷擾、干擾和欺騙的魯棒性技術,我們需要將這些不同的概念組合集成到一起。這里把十種與GNSS密切相關的,人們熟悉的,或者新概念的發(fā)展趨勢作個介紹。其中包括:導航用照相機、小型便宜的傳感器、多模GNSS信號與系統(tǒng)、定位用通信信號、3D圖形、多傳感器導航、場景化定位、機會信號、協(xié)同定位和完好性技術。
無處不在的照相機。近些年來,照相機逐步成為重要的新的導航傳感器,雖然視覺導航系統(tǒng)從上世紀九十年代已經開始發(fā)展,但是硬件的價格和圖像解釋要求的處理能力無法滿足,限制了它的應用。現(xiàn)在便宜的數(shù)字照相機已經十分普及。照相機業(yè)已成為移動電話、自主車輛的標準設備,從硬件而言,照相機與導航系統(tǒng)已形成協(xié)議連接。過去十年間,移動平臺的圖像處理和計算能力有了長足進步,基于照相機的研究已經深入導航和定位界。照相機是多才多藝的傳感器,在導航中至少有三種不同的方式加以運用。一是作為系列存儲圖像以確定照相機視點;二是識別圖像獨特的特征,細化完善定位數(shù)據;三是作為視覺里程計,形成航向推算能力。
微型傳感器、雷達和其它。數(shù)十年來的研究,已經形成加速度計、陀螺儀和時鐘,重點是解決小型、輕便、低價位、低功耗問題,業(yè)已取得明顯進步。通過改進濾波和定標技術,部署傳感器陣列,可以大為改進現(xiàn)有的傳感器性能。美國國防先進研究計劃局(DARPA)研究了微型傳感器技術,以降低GPS干擾帶來的軍用脆弱性。潛艇導航測試了冷原子鐘干涉儀,以及片上原子鐘現(xiàn)在已經投入商業(yè)應用。磁力計改進不大,但是已經大量用于低價位場合,它們的精度性能對于姿態(tài)確定的影響不是關鍵,更大的影響來自于環(huán)境磁異常,和車輛載體的磁化效應。數(shù)十年來,雷達用于空中和海上導航,提供航位推算和定位。雷達系統(tǒng)用于自主陸地車輛的防碰撞,而且已經成為普通汽車的標準導航配置。3D萊塞提供的分辨率高于雷達,但是作用距離較短。掃描萊塞器提供最高的分辨率,快閃LiDAR快速更新率和低價位、小型化與低功耗。
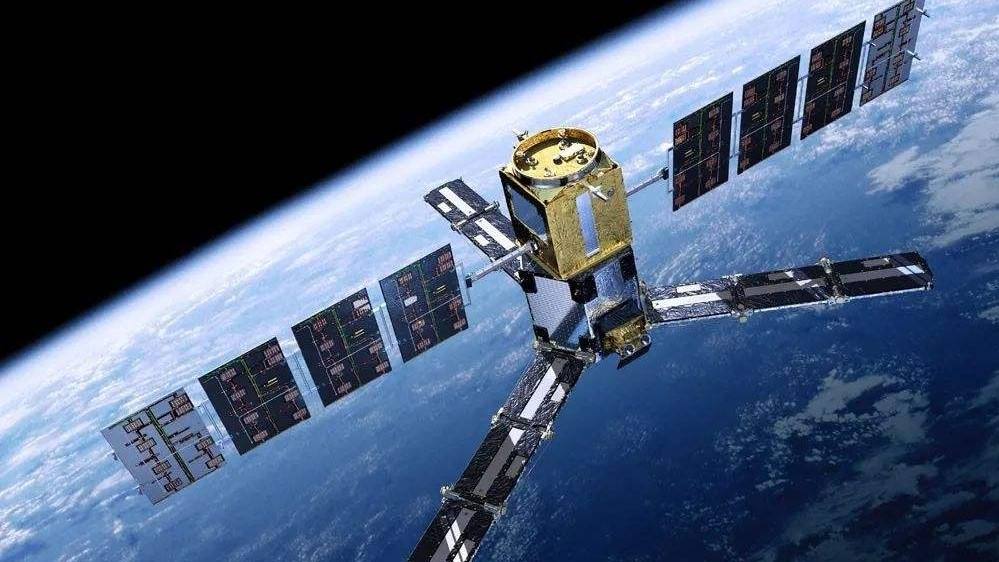
GNSS及其成功的煩惱。新的GNSS星座、信號和相關的頻率分集,激勵了用戶設備設計創(chuàng)新,導致定標電離層傳播時延能力的改進和抗干擾的魯棒性增加,以及高碼率信號形成的更好的精度。多模GNSS信號支持自主完好性監(jiān)測和非視距傳播的檢測。檢測技術包括多頻信噪比比較、衛(wèi)星內部一致性驗證和雙極化天線使用。即使四個衛(wèi)星星座的使用,也有地方無法同時收到四顆衛(wèi)星的視距信號,如城市峽谷,或者室內情況。顯然,GNSS的成功,也存在其煩惱。因此,開展干擾源檢測和消除其影響,開展頻譜保護行動。在GNSS現(xiàn)代化過程中,不斷改進干擾緩解技術,更多地采用組合信號、矢量跟蹤和捕獲技術,利用更多的衛(wèi)星和信號。拓展相關積分時間間隔長度,改進接收機靈敏度,更加容易地接收無數(shù)據信號。當然,最大的阻力來自于騷擾和干擾,所以提倡GNSS與其它導航技術的集成融合。
通信與定位算法。過去十年來,導航技術的最大創(chuàng)新是將通信信號用于定位目的。智能電話和其它消費設備現(xiàn)在用電話信號和WiFi定位。超寬帶(UWB)通信信號,也專門用于定位應用。新的通信標準也伴有定位技術,下一波基于通信的定位系統(tǒng),可能是在第五代移動通信、藍牙低功耗,以及銥星這樣的通信衛(wèi)星。新的通信系統(tǒng)伴有通用的協(xié)調定位協(xié)議。在將來的系統(tǒng)中,最弱的連接通常是信號傳播環(huán)境。因此,測距精度受制于非視距接收和多徑干擾。同樣,基于信號強度的定位取決于定標方法的范圍和信號傳播環(huán)境隨著時間變化的程度。關鍵是如何表征傳播特性,以及在定位算法中將其結合進去。
3D(地)圖形。汽車導航應用的數(shù)字地圖,是在上個世紀90年代開始的,而飛機用的地面參考導航(TRN),使用的是地面高度信息,這要來得更早。如今在具有挑戰(zhàn)性的城市區(qū)域,3D城市圖形可能是最有革命性的定位技術。街圖加上高度信息可以輔助GNSS定位,服務于車輛和行人導航,可以減少所要求的衛(wèi)星信號,或者提供支持基于一致性的非視距(NLOS)和多徑效應監(jiān)測。3D建筑物信息可以幫助預測街區(qū)和GNSS與其它無線電信號的反射。這些信息可用來從多個可用的定位計算解決方案中選擇最為精確的距離測量方法。原則上,3D建筑物模型可以用來修正NLOS接收和多徑效應造成的誤差。但是,這對于計算強度要求高,而且多徑效應修正需要厘米級精度的建筑物模型,才能夠確定信號的相位偏移。倫敦大學學院(UCL)空間大地和導航實驗室(SGNL)研發(fā)的盲區(qū)匹配技術,應用3D模型預測信號被建筑物遮蔽,然后將其與用于定位的實測信號可用性進行比較。盲區(qū)匹配可以用來確定城市環(huán)境中街區(qū)的修正側,也就是普通的GNSS定位精度不足之處。最近表明這一成果已經用在消費型智能電話的實時工作中。更為詳細的圖形可以將圖形匹配技術從車輛應用擴展至行人導航,直至室內圖形修正與匹配。
多傳感器導航拼圖。歷史上,所謂的集成導航,通常是意味著兩個系統(tǒng)的組合,如GNSS與慣性導航,偶然也會是三個系統(tǒng),如GNSS、里程計和(地)圖形匹配。但是現(xiàn)在這里所說的將來的集成系統(tǒng),可能是許多個組成部分構成的。其中主要有兩個原因:一是還沒有一種技術特別好地工作于行人導航和其它挑戰(zhàn)性應用,而高可靠性應用需要有GNSS緩解干擾和騷擾的風險要求;二是通常的智能導航包括有照相機、慣性與磁傳感器、地圖、GNSS接收機、WiFi收發(fā)裝置以及移動通信電話本身,所有的組成部分均可用于導航。不久的將來,汽車也會具備適合于導航的不同傳感器陣列。將來的導航是多傳感器的,會帶來兩種挑戰(zhàn):一是系統(tǒng)集成,怎樣從各種各樣的傳感器、無線電設備和數(shù)據庫中提取導航信息,而它們中的大多數(shù)安裝的目的不是導航,或者關系不大;二是如何實現(xiàn)各種子系統(tǒng)的組合信息的最佳化。許多傳感器顯示出偏差和其它系統(tǒng)誤差,需要在集成系統(tǒng)中加以定標校正。但是子系統(tǒng)也可能輸出誤差信息,來源是非視距信號傳播、誤識別信號或者環(huán)境特征、或者是主要特性的錯誤判別。多傳感器系統(tǒng)必須檢出這種缺省信息,防止它污染其它傳感器的定標校正。由此可見,某些子系統(tǒng)的誤差特性可能不完全知道,最終不同子系統(tǒng)的性能取決于環(huán)境,以及車輛載體和行人用戶的動態(tài)特性,從而引起了場景問題。
場景就是一切。導航系統(tǒng)工作在一個特定的場景下,在以車輛或者用戶為對象的物理環(huán)境中,是種確定情況的表現(xiàn)。場景可以給導航解決方案以附加信息。例如,汽車保持在公路上,從定位解決方案而言,可以能夠有效地消除一個維度。它們的輪子也強制約束在它們可能運動的路上。減少了要求測量它們運動的慣性傳感器數(shù)量。同樣,行人的航向推算(PDR)使用步進檢出,本質上取決于人步行的特征。環(huán)境還影響到可用信號類型,例如,GNSS接收機在室內工作得不好,而在郊區(qū)無法采用WiFi信號,大部分無線電信號不能夠在水下傳播。行人與車輛行為特性也取決于環(huán)境。與在高速公路相比,汽車在城市中一般行駛的較慢,停頓時間較多。隨著頻率增加,導航系統(tǒng)應用場景信息(如運動約束條件),可以改進性能。但是,當假設場景與實際場景出入較大時,會出現(xiàn)問題。歷史上,導航系統(tǒng)是為一種類型車輛工作在特定環(huán)境下設計的。但是導航系統(tǒng)的需求增長,要求工作在各種各樣不同的場景下。例如,智能電話可能在室內和室外環(huán)境中轉換,可能靜止不動,可能在行進中,或者也可能在車子上。場景自適應,或者認知定位,代表一種趨勢,是種剛剛出現(xiàn)的苗頭,導航系統(tǒng)要檢測其工作環(huán)境,按照檢測結果重新設置其算法。各種不同類型的環(huán)境的區(qū)分,主要基于各種無線電信號的強度和接收到GNSS信號的不同方向。運載體類型可以從它們的速度、加速度分布情況,以及從發(fā)動機震動現(xiàn)象導出震動特征、空中湍流、海態(tài)運動和公路表面的不規(guī)則性。基于導航系統(tǒng)檢測到的場景變化,可以通過不同方式處理慣性傳感器的數(shù)據實現(xiàn)自適應操作,選擇不同的地圖匹配算法,改變調試集成算法。
機會導航。傳統(tǒng)的導航方法是定義一組性能要求,然后部署必要的基礎設施和用戶設備,以滿足這些這些性能要求。機會導航則是,要求采用周圍環(huán)境中已經有的信息,用來得到最有可能的定位解決方案。本質上,這種原理如同人和動物,原先沒有依賴任何的技術幫助,就可進行導航一樣。無線電機會信號(SOOP),是將原先非導航目的的信號加以利用,也不需要操作者間的協(xié)調,包括來自于網絡的電話信號,使用者不一定是用戶,附近建筑物中泄漏出來的WiFi信號,以及電視和無線電廣播信號。機會信息可以是任何可測量的環(huán)境特征,它隨著空間而變化,但是隨著時間沒有明顯變化,正如建筑物及其標識、磁異常,和地面高度的變化等。機會導航需要可供工作的特征數(shù)據庫、WiFi接入點位置和電話信號場強地圖,在許多城市已經被列為商用,當然用戶也可以建立自己的數(shù)據庫。機會導航采集數(shù)據的一種方法是,當GNSS定位解決方案可被采用時,采集信號和環(huán)境特征,而當GNSS經受干擾時,就用這些采集的數(shù)據進行定位。另一種方法是人們所熟知的同時定位與繪圖(SLAM),目的是同時繪制地圖,并且確定用戶位置。SLAM利用航位推算測量用戶設備通過環(huán)境時的相對運動。
協(xié)同定位。協(xié)同定位,或者肩并肩定位,是一組用戶工作在一起確定它們的位置,協(xié)同的概念是數(shù)據分享和相對定位。數(shù)據分享是交換周圍的環(huán)境信息。這包括GNSS星歷、衛(wèi)星時鐘數(shù)據、位置和時間偏離,以及地面無線電發(fā)射機信號識別信息、環(huán)境特征數(shù)據和地圖信息。協(xié)同定位可以明顯地增強機會導航。在已知位置上的兩個伙伴,應用照相機觀測未知的陸地標志,就能確定其位置,將這一信息發(fā)送給第三者,后者應用陸地標志幫助其確定自己的位置。分享的數(shù)據也可供自己應用。但是完全的協(xié)同定位系統(tǒng)也是協(xié)同相對定位。用戶測量和分享它們間的距離,或者類似信息。這表示信號和特征的應用,其它伙伴的觀測有助于確定位置,對于那些無法獨立達到定位解決方案的用戶尤其有用。
完好性。由于技術業(yè)已成熟,用戶希望更高的可靠性。這就是說,更加可靠的技術,對于安全關鍵和使命關鍵應用是可以實現(xiàn)的,是真實可信的。過去二十年間,嚴格的完好性框架業(yè)已建立在民用航空中,使得GPS能夠滿足重要的安全需求。其它應用也等待高完好性定位的起飛,如海事運輸、先進的鐵路信令、基于位置交費安排,和已經虛擬化的安全電子圍欄。但是,在這大多數(shù)應用中,沒有單一的定位技術在所有環(huán)境中工作都是完全可靠的。因此,對于導航界的挑戰(zhàn),就是形成多傳感器集成解決方案,滿足極其重要的完好性要求。







 環(huán)球新時空
環(huán)球新時空 斗室智庫
斗室智庫