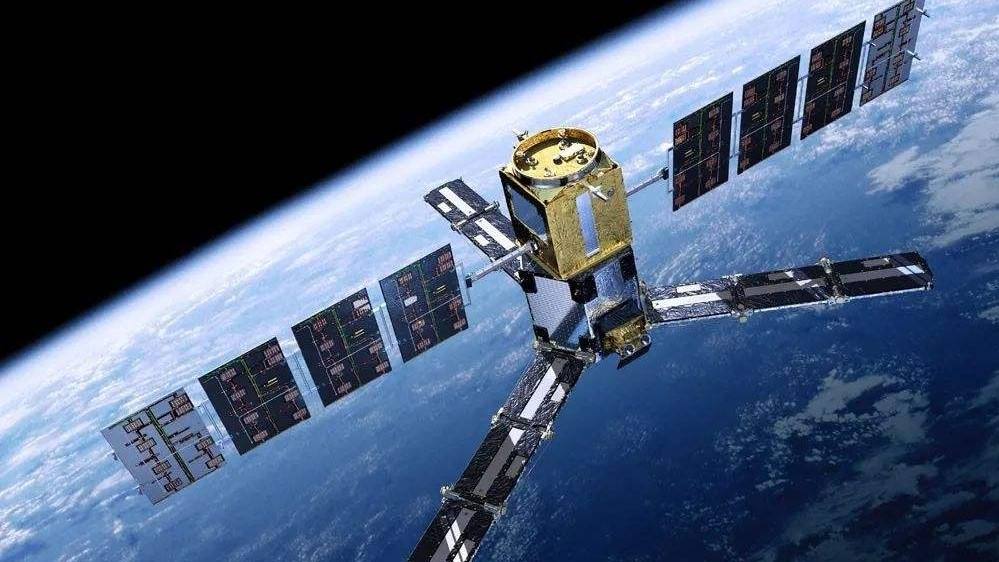
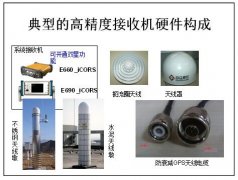
在80年代只有一種GPS接收機,十年后便有100余種接收機,至今己有500多種不同型號和用途的接收機,有軍用和民用的,有路點導航、大地測量和時間傳遞的,有C/A碼兼或P(Y)碼的,有單頻和雙頻的,有單一GPS和GPS/GLONASS兼容的。它們在設計上、結構上、能力上、大小上和工作原理上均存在著差別。GNSS接收機由一系列部件組成,其中包括天線及其相關的前置放大器、射頻(RF)前端部分、信號跟蹤控制處理部分、命令進入與顯示部分,以及電源部分。
以GPS接收機為例的GNSS接收機通用的框圖通常包括:1) 天線/前端:單頻機只通過L1頻率,雙頻設計通過L1與L2;2) 模-數(A/D)變換器:有單比特、多比特和自適應門限型多種類型;3) 硬件/軟件信號處理:單信道設計是依次處理每顆被跟蹤的衛星,多信道設計同時將A/D輸出給平行的信道,而每個信道獨立跟蹤單獨的衛星;4) 導航處理:將GPS測量數據與外接傳感器數據組合集成處理得到導航解。
為了能確切地理解GPS接收機的性能和作出判斷,必須弄清以下一些重要概念與術語。
(1)無碼與半無碼接收
無碼接收是指無需知道C/A或P偽隨機噪聲碼,便能通過交差相關和干涉儀技術進行接收定位,這是在單信道接收機時常用的,當多信道接收機普遍采用時,則在不知道P碼的條件下來解載波信號的整周模糊度。所利用的技術是“扯平測量”(squaring),或曰寬巷技術。半無碼技術是利用近似于加密碼的碼率,可以將檢波器前的帶寬降到500kHz,近似減小20倍。從而可用“無碼扯平”或“交叉相關”技術,將普通的接收機視同P碼接收機。在P碼相關器與500kHz濾波器之后的處理過程,半無碼方法與無碼方法是相同的。使用這兩種方法的接收機與完善的C/A碼載波相位跟蹤接收機相比,其信噪比要低27.8-37.8dB(無碼)和14.8-24.8dB(半無碼)。
(2)預相關采樣
預相關采樣原先只在軍用接收機中加以考慮,現在已普遍應用于軍用和民用數字接收機的技術。預相關采樣用硬限幅器或1-bit采樣,以及多-bit采樣。后者與前者的最大差別是它有個自動增益控制(AGC)保持對A/D檢測器電平有個信號加噪聲的幅度。這在存在窄帶噪聲強干擾時非常重要,可以自適應AGC控制干擾電平。
(3)載波跟蹤和碼跟蹤
所有的GPS接收機都要進行載波跟蹤,有自動頻率控制(AFC)的頻率跟蹤和利用鎖相環的相位跟蹤,所有測量接收機無一例外地用相位跟蹤,普通接收機則用頻率跟蹤,其優點是易實現跟蹤或為相位跟蹤作起始引導。大多數接收機利用載波輔助碼跟蹤技術,它允許用無環路濾波器的一階碼跟蹤環,或稱時延鎖相環,它無法跟蹤動態變化,環路帶寬亦窄,可提供較精確的偽距測量。用載波相位測量平滑偽距碼測量是在跟蹤環外實現的,它對多徑效應的平滑特別有效。
(4)衛星跟蹤方略和全視野接收
衛星跟蹤方法有并行、串行、串并行三種。現在生產的大多數接收機是并行信道,一個信道跟蹤一顆衛星。而較老式的接收機用時分方式一個信道接收多顆衛星的信號。全視野接收是指五度仰角以上的衛星全能收取。
(5)首次定位時間(TTFF)
標準的首次定位是在一定的條件下,如位置、速度、時間和頻率不確定性,以及干擾電平和可用性時,成功實現定位的概率:C/A碼和載波相位需時2-10秒,比特同步1-2秒,幀同步1.2-7.2秒,星歷和時鐘數據采集16.8-28.8秒,以及可變的導航解收斂所需的時間。由此可見,在數據良好、不確實性較小和理想的信噪出條件下,首次定位時間不低于21秒,有時可能超過40秒。
“冷啟動”也是一個多變的定語,這意味著時間、位置、星歷,乃至衛星的PRN號全不知道的條件下,實現首次定位所需時間。通常商用機要1分鐘,軍用機可能要5分鐘。
(6)測量精度
這是很容易引起誤導的參量,產品介紹常常給出特別理想的信噪比(C/No>50dB.Hz)和可用性條件下的值,而且只是相對值,也可能是一定時段內的平滑值。
(7)接收機靈敏度
通常民用接收機給出的是不存在噪聲條件下的值,一般衛星發射功率比實際指標高出5-6dB,使民用機受益非淺。但新的海事衛星上的GPS WAAS導航艙的功率則未留這些裕量。






 環球新時空
環球新時空 斗室智庫
斗室智庫