正在收集有關電子設備的信息的過程,以生成特定的簽名來識別設備本身。本文研究了全球導航衛星系統接收機指紋識別的潛在策略。從接收機提供的時間序列中計算出若干度量,并將其作為指紋的候選特征進行分析和考慮。結果表明,從接收機時鐘漂移計算出的特征是最合適的確定接收機簽名的方法。三個時鐘派生的度量足以確定接收者的指紋,并建立一個“白名單”來識別接收者。
一些先進的服務依賴于全球導航衛星系統(GNSS)接收器作為數據提供者。全球導航衛星系統衍生的位置、速度和時間(PVT)信息提供應用,如基于鄰近的營銷、實時旅行服務、交通更新、精確農業、天氣報告和路邊援助等應用。
全球導航衛星系統接收器在多種受管制的應用中也起著重要的作用。
,CIRO GIOIA,EDUARDO CANO-PONS,
歐洲委員會,聯合研究中心(JRC),董事會對空間,安全和移民局,意大利
安全性是一個重要方面。 在道路運輸部門,歐洲議會和理事會于2014年2月通過的新的歐盟第165/2014號條例(參見歐洲委員會的額外資源)預見將推出新一代數字轉速表(DT),稱為“智能轉速表 ,“增加了安全機制,GNSS組件和不同的通信接口。 行車記錄儀記錄駕駛時間,并降低疲倦駕駛員對事故風險較高的車輛進行寬松控制的風險。 對于違反規定和篡改行駛記錄儀系統,有潛在的經濟誘因。 在這方面,從可信的GNSS接收機安全提供PVT信息是一項重要的資產。
集成在智能手機中的GNSS接收機也可以用來增加手機銀行服務的安全性(參見A.Panjante的
此外,也有可能在智能手機的使用經濟利益偽造的GNSS接收機提供的數據。 在這方面,全球導航衛星系統接收器可以被理解為網絡中的節點,它們將位置數據提供給更高的服務水平。在行車記錄儀、車載單元,即安裝在商用車監控司機的駕駛行為的記錄設備,實施和提供這些更高的服務水平。在智能手機領域,這些級別的最終用戶應用程序:電子欺詐可以利用GNSS接收機和較高的服務水平之間的通信信道可能的漏洞。特別是,GNSS裝軟件(GFS)的應用程序可以安裝在智能手機上偽造用戶的位置,以獲取個人或商業利益為最終目標。
數據偽造包括截獲真正的GNSS數據并用偽造的位置信息替換它們。與在信號空間(SIS)級別操作的干擾和欺騙不同,GNSS數據偽造在接收機級工作。GNSS數據造假試圖攔截和篡改的GNSS接收機和應用節點之間的信息。
在全球導航衛星系統欺騙中,可以利用難以偽造的SIS特定的有限元分析來檢測攻擊。 (見A. Jafarnia Jahromi等特別的額外資源)。類似地,GNSS數據偽造的一種可能解決方案是使用難以偽造的特定于設備的特性。這種方法通常被稱為設備指紋識別,它被定義為“收集設備信息以生成設備特定簽名以識別單個設備的過程”(Q. Xu等,其他資源)。指紋識別已成為節點偽造或假冒威脅的無線網絡領域的重大興趣。節點偽造包括由攻擊者使用合法的憑證進行欺詐活動。GNSS數據偽造類似于無線網絡中的節點偽造。
在GNSS欺騙中,通過利用難以偽造的SiS特有的特征,可以檢測到攻擊
特別是,模擬器或其它設備可以用來模擬一個實際的GNSS接收機。通過這種方式,可以將誤導的PVT信息發送到最終的PVT用戶。全球導航衛星系統接收機指紋可用于安全增強的應用,至少在一定程度上能夠驗證GNSS數據的真實性。在這樣的應用,依賴于GNSS數據的設備,如行車記錄儀的車輛單元,也將從GNSS信息提取獨特的特性通過與以前記錄的數據比較,可用于驗證全球導航衛星系統接收機的身份。
在DT的潛在部署場景中,車輛單元可以在初始安裝階段或定期校準檢查期間記錄全球導航衛星系統接收機的指紋(例如,按規定定義每兩年一次)。安裝和校準階段是在受控環境中(例如,車間)進行,由安裝者能夠檢查GNSS接收機的身份。
設備指紋識別的第一步是選擇適當的特性,它應該滿足兩個基本特性:特征應該很難偽造,并且在環境變化方面是穩定的。
我們研究了全球導航衛星系統接收機指紋的適當特征選擇。這個過程包括首先考慮一組冗余的指標,這些指標有識別接收者的潛力。然后使用過濾方法選擇指紋,即原始度量集的子集。 我們首先研究與接收機時鐘有關的度量,總結作者在2016導航學會GNSS會議上提出的結果,并在附加資源中列出。然后,我們將分析擴展到與時鐘無關的特性。
基于時鐘的指標
電子設備的指紋識別通常基于明顯的缺陷,例如被測試設備的本地振蕩器產生的誤差。在無線網絡中,無線射頻(RF)振蕩器的缺陷已被用來作為一個偽造特征的可靠源(見,例如,在額外的資源,A. C. Polak和D. L.戈克爾)。
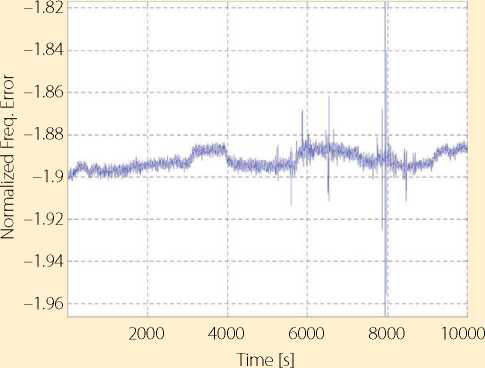
例如,考慮一下如圖1所示的正常化頻率誤差。通過正常化接收機時鐘漂移估計作為GNSS接收機的導航解決方案的一部分獲得該時間序列,(可能)具有的穩定特性顯示出明顯的隨機效應。這些特征必須被識別并作為特征使用。
我們分析了在文獻中采用幾種指標來描述時間/頻率源行為。
通過正常化時鐘漂移估計作為大眾市場的導航解決方案的一部分,
如圖1所示的GNSS接收機得到的正常化頻率誤差
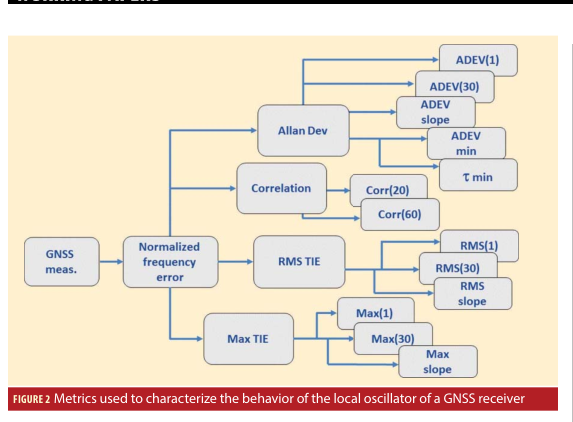
所考慮的指標如圖2所示,也描述了評估采用的方法的主要內容。 GNSS測量用于計算用戶PVT解決方案。 然后從時鐘偏差dt計算標準化的接收機頻率誤差f[n]
這里n是時間索引,T是
五個采樣率。 f [n]也可以通過GNSS中心頻率正常化時鐘漂移來計算,在這種情況下fL1 = 1575.42 MHz。 圖1所示的時間序列是通過對靜態數據采集過程中估計的時鐘漂移進行歸一化得到的。 值得注意的是到時鐘漂移和時鐘偏差是從不同的可觀測量,多普勒測量和偽距計算的。 因此,它們有不同的特點。 我們在ION 2016 GNSS +會議上發表的論文中指出,由多普勒測量得出的歸一化頻率誤差導致對環境變化更穩定的特征。 多普勒測量受不同誤差源的影響較小,因此對于接收機特征的確定應該是優選的。
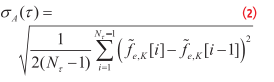
然后使用歸一化頻率誤差來計算不同的度量,例如Allan 偏差定義(參見S. Bregni,額外的資源):)
其中T = KT,通常是基本采樣間隔的整數倍。 fem是歸一化頻率誤差的濾波和降低采樣版本。 尤其是,
因此,| 是在K個樣本上平均的歸一化頻率誤差。 (2)中的N是在濾波和采樣后可用的頻率誤差的數量。
偏差是取決于平均時間T的曲線。由于這個原因,它不能被直接用作指紋的特征。 因此,描述艾倫偏差行為的總結統計是必要的。 我們選擇T = 1秒和T = 30秒時的Allan偏差,T = 1秒和T = 30秒之間的曲線斜率,最小值以及對應于最小艾倫偏差的平均時間。 通過這種方式,從Allan Deviation獲得了五個特征。
對于通常用于表征時間和頻率源的其他性能曲線進行類似的處理。 我們考慮了均方根時間間隔誤差(RMS-TIE),最大時間間隔誤差(MTIE)以及歸一化頻率誤差樣本之間的相關性。 至于艾倫偏差,總結統計被選中。 這樣總共確定了13個特征。 有關所選不同特征的更多詳細信息,請參見D. Borio等人。
與時鐘無關的指標
許多大眾市場接收機只提供用戶的位置和速度。 在這種情況下,不可能計算上面討論的基于時鐘的度量。 為此,我們考慮了接收機識別與時鐘無關的特性。 術語“不相關的時鐘”被用來表示從位置和速度時間序列導出的特征,即不包括接收機時鐘偏差和時鐘漂移的數據。 分析的基本原理是影響時鐘的錯誤分量和導航解決方案中的垂直分量通常應該高度相關。 這樣,也可以從導航解決方案的空間分量中提取接收機指紋的有效特征。
我們采用類似于時鐘相關功能的方法。 特別是上一節描述的特征是使用速度和位置分量計算的。 例如,艾倫偏差是使用速度時間序列計算的。 在這種情況下,Allan偏差不能表征接收器振蕩器的穩定性,但決定了速度解的質量。
從進行的分析中可以看出,與時鐘無關的特性一般不與時鐘相關。 圖3比較了使用兩個不同接收器的不同PVT分量計算的Allan偏差。 該圖的左欄考慮使用基于多普勒的時間序列計算的Allan偏差曲線。 由于速度分量和時鐘漂移具有不同的歸一化,為了使每個圖的初始點重合曲線已經移動。
特別是,艾倫偏差被轉移到一開始。 在圖3的第一行中考慮的一個接收機的TE [1 – 100]的不同曲線之間發現了Allan偏差之間的良好匹配。然而,對于考慮在其中的另一個接收機,相同的結果是不正確的。
底部一排。 盡管在考慮偽距導出的度量時發現更好的匹配(見圖3的右列),但與時鐘無關的度量傳遞通常基于時鐘的對應不同的信息。 因此,這個結果是從時鐘偏差獲得,而漂移不能直接應用于從位置和速度時間序列中提取的特征。
過濾和特征選擇
在選擇冗余候選特征集之后,有必要應用選擇過程以確定用于分類的最有效的特征子集。 特征選擇算法大致分為過濾和包裝方法(參見G. Chandrashekar和F. Sahin的綜述,其他資源)。 前面的方法使用成本函數來排列不同的特征子集。 后面的技術圍繞分類器/預測器(即所選特征子集的最終“用戶”)包圍選擇過程。 特別地,包裝方法選擇具有最高分類性能的特征的子集。
我們采用了一種過濾方法作為復雜性和性能之間的折衷。 為了應用濾波方法,首先需要對從GNSS接收機獲得的時間序列進行預處理。 這里應用的預處理在圖4中簡要概括。為特征計算收集的時間序列首先被分割成有限持續時間的數據塊。 每個數據段將被用于計算上述度量的不同實現。 這樣就獲得了幾個特征向量的實現。 請注意,不同型號的幾個接收機已被用于下一節中所述的分析。 每個接收器模型代表一個類。 以這種方式,為不同的類別獲得特征向量的幾個實現。 特征向量的分量是不均勻的,并且可以假定明顯不同的值。 因此,規范化是必需的。 這里使用以下標準化:
其中xf表示第k個特征的第j個實現。 劃線符號用于表示標準化數量。 在下文中,將使用額外的索引來表示將用于表示特定類或接收者類型的成員資格。考慮所有接收機類別的所有特征實現,獲得最大值和最小值。 使用方程式(4),獲得正常化的特征向量,其中每個分量取[0,1]范圍內的值。
數據預處理后,應用特征過濾。 這里考慮的分數函數是
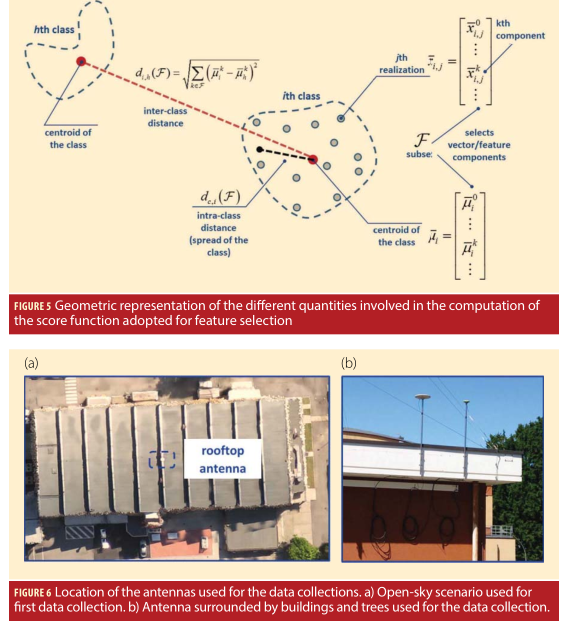
其中F表示分析中的子集,并且d(F)是類別i和j之間的類間距離。 d(F)是第i類的組內距離。 類內和類間距離是根據歸一化特征定義的(4)。 特別是,類內距離被定義為
其中N 是實時特征的數量,對于第i類/接收器類型,Xi’j表示第k類正常化分量,第i類的特征向量的實現。 是i類的特征均值向量的第k類組成。 方程式(6)量化了一個類的傳播。 類間距離定義為
并描述兩個類之間的平均距離。 圖5提供了這里定義的不同數量的幾何解釋。 它顯示得分函數(5)是類之間的最小距離和較大的類大小之間的比率。 因此,選擇子集F是為了使類之間的擴展最大化,并使類維度最小化。
設置
前面部分描述的理論框架已經使用在兩個數據收集期間收集的數據來實施和測試。測試在不同的周和不同的信號條件下進行。選擇了兩種不同的情景來評估環境變化的特征穩定性。
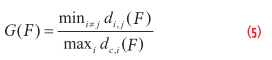
第一個測試是使用位于意大利伊斯普拉聯合研究中心(JRC)的歐洲微波簽名實驗室(EMSL)的大地測量天線進行的。 EMSL是該地區最高的建筑物,天線周圍沒有障礙物。因此,第一次測試是在露天條件下進行的。
第二個測試是使用安裝在JRC校園辦公樓屋頂上的天線進行的。在這種情況下,建筑物被更高的建筑物和高樹所包圍造成的多徑、衰落、創建干擾信號環境。
用于數據收集的天線位置如圖6所示。
這兩個數據收集設計和采用了一個通用的設置。在每個設置中,使用RF分離器將幾個接收機連接到相同的天線,并用于收集每個實驗幾乎四天數據。
每個數據收集的長度證明了上一節介紹的數據分段。 接收機以1赫茲的數據速率記錄原始GNSS可觀測值,即偽距和多普勒頻移。 使用不同類型的接收機,包括大眾市場和專業多星座接收機。 為了有相同的條件,只有GPS測量數據被用于數據分析。 而且,所有的接收機都采用了一套通用的星歷表。 這樣,不同的接收機采用了相同的運行條件。
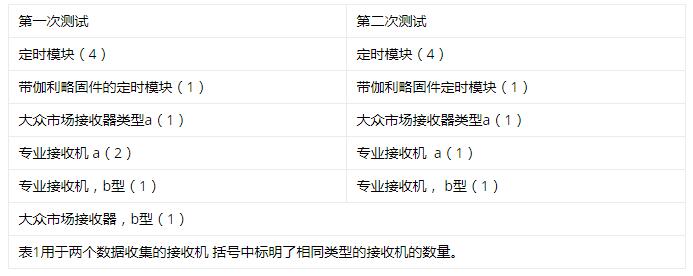
表1中提供了兩次測試中使用的接收器列表,以及相同類型的設備數量。 設備的實際型號可以在制造商部分找到。
兩個數據收集使用了五個GNSS定時模塊。 其中一個更新了最新的固件,可以處理伽利略信號。固件更改對相同類型的設備的影響是更新履行分析。
實驗結果
在上述兩次測試期間收集的數據被用于特征選擇。 特別考慮了兩個和三個要素的子集。 對于每個子集,計算得分函數(5)。 我們只考慮由多普勒測量得到的特征,即從速度/時鐘漂移解算得到的特征,因為這些類型的可觀測量對于誤差和環境變化具有更高的穩定性。 已經使用一小時的數據段(即,3600個元素)來計算特征。
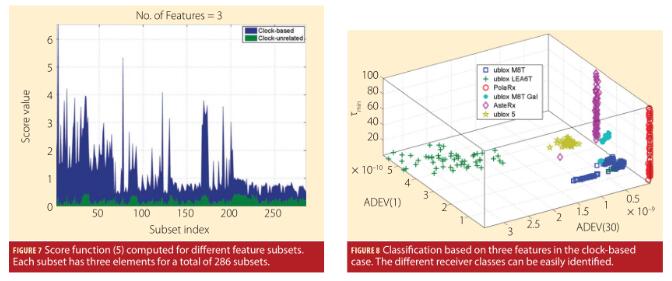
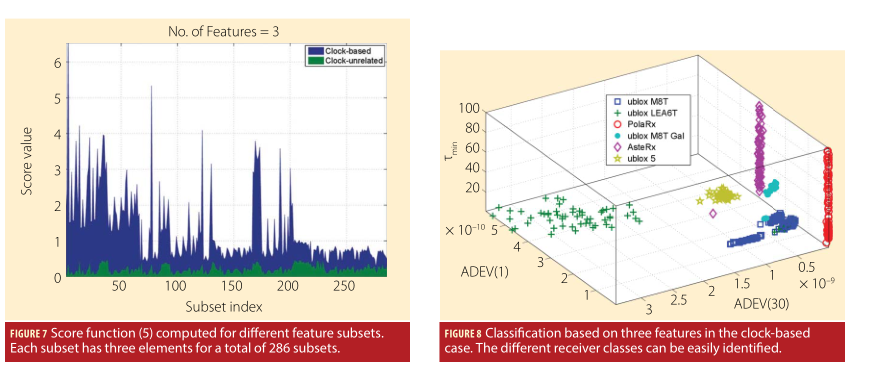
在圖7中分析了三個元素的子集,其中考慮了基于時鐘的和與時鐘無關的度量。
在基于時鐘的情況下,從接收器時鐘漂移計算特征。 在與時鐘無關的情況下,使用速度解的上行分量。
由于最初考慮了13個特征,因此總共發現了286個子集。 圖7中的橫坐標是用于枚舉三個元素的不同子集的索引。 從圖7中報告的結果可以清楚地看出,基于時鐘的特性明顯優于其與時鐘無關的特性。 在基于時鐘的情況下,得分函數的最大值大于6。 這意味著,對于導致最大(5)的特征子集,最小的類間距離比最大的類間距離大6倍以上。 通過這種方式,類/接收器類型被清楚地分開,并且可以執行有效的聚類。
這一事實在圖8中進一步分析,顯示了使用導致(5)的最大值的三個特征形成的簇。 這些特征全部來源于Allan偏差曲線,并且是在T = 1秒和T = 30秒處的Allan偏差以及導致最小Allan偏差值的平均時間。 在圖8所示的特征空間中可以很容易地識別不同的接收器。來自一家制造商的專業接收器在Allan Deviation方面顯示了與大眾市場器件相關的增強的性能。 鑒于不同的細分市場,即專業接收方,這是預期的。 類型a的大眾市場接收器是在兩個數據收集中顯示出顯著不同行為的唯一設備。
天空場景,這個接收器具有與上面提到的定時模塊相似的特性。圖8還顯示固件更新會影響接收者的行為。當考慮到伽利略固件更新的一個設備的行為時,這一事實清晰地出現了:由該設備確定的特性定義的群集與標準定時模塊明顯不同。
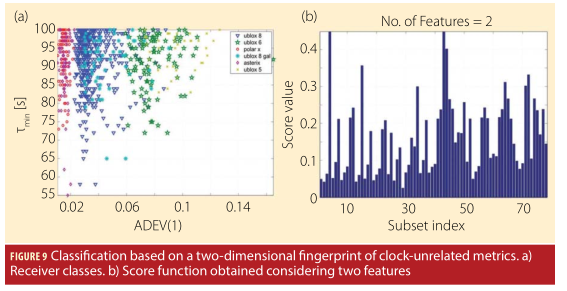
在與時鐘無關的情況下,得分函數總是低于0.5。這意味著類之間在時鐘無關的特性上有顯著的重疊。在圖9中進一步研究了這個事實,顯示了在二維情況下的特征選擇結果。為了清晰起見,這里考慮了二維特征向量。當考慮三維情況時,特征空間表示相當混亂,結果的解釋更加困難。此外,在圖9右側部分報告的得分函數表明,在與時鐘無關的情況下,從兩個特征的指紋移動到具有三個元素的向量時,沒有顯著的增益。
圖9左邊部分所示的接收機類表明,不同類型的制造商的接收機具有相似的特性。甚至當一個額外的功能是包括指紋時重疊圖9a觀察類之間的折中得分不增加。然而,觀察結果表明,時鐘無關的功能可以允許識別差異。
年4月獲得意大利都靈理工大學電氣工程博士學位。從2008年1月到2010年9月,他是加拿大卡爾加里大學PLAN小組的高級研究員。自2010年10月以來,他一直是歐洲委員會聯合研究中心的一名科學官員。他的研究興趣包括數字和無線通信領域,定位、導航。 Ciro Gioia 2009年從意大利帕斯諾普大學獲得航海科學理科碩士。2014年,在同一所大學他成功地捍衛了他的博士論文。從2013年5月到2014年4月,他在歐洲委員會聯合研究中心(JRC)客座研究員。從2014年5月到2016年6月他在JRC擔任外部顧問。目前,他是在歐洲委員會JRC擔任科學技術項目主任。他的研究興趣集中在定位和導航方面特別著重測繪學。
Eduardo CanoPons2002獲得了巴塞羅那加泰羅尼亞技術大學通信碩士學位。2006年他獲得了該校的博士學位。
的研究領域是無線網絡干擾建模和全球導航衛星系統和無線通信的信號處理技術。在歐盟委員會聯合研究中心擔任空間、安全和遷移主管。在2007年作為科學主任加入歐盟委員會聯合研究中心前他曾在愛立信、朗訊科技休斯網絡系統和芬梅卡尼卡擔任高級技術建筑師和系統工程部經理。他目前在智能運輸系統和物聯網的應用的研究主要集中在導航、無線通信和安全方面。在無線通信領域,導航和安全領域與G i anmarc o Ba ldini的合著論文60余篇。
國立大學-博士生導師。habil。h.c. Guenter W. Hein博士
他是慕尼黑卓越的FAF大學名譽教授。2008和2014間他是ESA EG NOS和全球導航衛星系統演進計劃部,負責開發第二代EGNOS和伽利略。Hein教授還組織ESA / JRC GNSS國際夏季學校。他是一年一度的慕尼黑衛星導航峰會的創始人。Hein教授了300多篇科技論文,開展了200余項科研項目,培養了70多名博士,2002年他獲得了美國航海研究所每年在世界上只授予一個人的最高的航海獎,著名的 “衛星導航持續和重大貢獻” 開普勒獎“。2011年G. Hein成為個美國人。2013年布拉格科技大學對他衛星導航的成就授予他榮譽博士。自2016以來,他是慕尼黑航空航天局執行董事會成員。









 環球新時空
環球新時空 斗室智庫
斗室智庫