2016年12月21日 上午12:00:00
未來的汽車導(dǎo)航是高度互聯(lián)的,能夠動態(tài)使用來自云端的高分辨率地圖信息以及車輛和環(huán)境數(shù)據(jù)。它們是強(qiáng)大的駕駛員輔助、智能電動汽車和自動駕駛的推動者。作為移動出行行業(yè)軟件工程服務(wù)的全球供應(yīng)商,Intellias 參與了其中的許多開發(fā)。
盡管現(xiàn)在的地圖和導(dǎo)航數(shù)據(jù)比 10 年前更容易(多虧了行車記錄儀、無人機(jī)和衛(wèi)星),但收集這些數(shù)據(jù)仍然是勞動密集型的。即使世界的大部分角落已經(jīng)記錄在公共和私人地理信息系統(tǒng) (GIS) 中,這些地圖仍然需要定期維護(hù)。隨著物理世界的不斷發(fā)展,數(shù)據(jù)準(zhǔn)確性和及時性是移動出行行業(yè)的兩大挑戰(zhàn),其次是覆蓋范圍。為了滿足這些要求,導(dǎo)航和數(shù)字地圖的發(fā)展正在加快步伐。以下六大技術(shù)和部署趨勢將在未來幾年推動汽車地圖和導(dǎo)航的發(fā)展。

1. 使用 AI 豐富地圖數(shù)據(jù)
衛(wèi)星圖像是地圖創(chuàng)建的一個突破。然而,問題在于大多數(shù)地圖軟件無法直接處理衛(wèi)星照片。首先需要將視覺數(shù)據(jù)以合適的格式編纂成全面的導(dǎo)航數(shù)據(jù)集,例如導(dǎo)航數(shù)據(jù)標(biāo)準(zhǔn) (NDS)。然后,地圖所有者必須使其保持最新狀態(tài)。這兩個過程成本高昂且勞動密集,使其成為人工智能 (AI) 在制圖中的絕佳用例。
AI 算法通過提供更頻繁地更新地圖和更快地繪制新區(qū)域的能力,提高了數(shù)字地圖構(gòu)建的速度和精度。他們可以對衛(wèi)星圖像中的對象(建筑物、道路、植被)進(jìn)行分類,以創(chuàng)建豐富的 2D 數(shù)字地圖以及多層 3D 地圖模型。借助精確的地圖,您可以提供更好的 ETA、詳細(xì)的燃料或能源使用估算以及更豐富的興趣點(diǎn)信息,讓用戶感到滿意。
除了促進(jìn)地圖數(shù)據(jù)的收集外,AI 還可以幫助生成此類數(shù)據(jù)。來自麻省理工學(xué)院和卡塔爾計(jì)算研究所 (QCRI) 的研究人員最近發(fā)布了 RoadTagger。該神經(jīng)網(wǎng)絡(luò)可以自動預(yù)測道路類型(住宅或高速公路)和車道數(shù)量,即使存在視覺障礙(例如樹木或建筑物)也是如此。該模型在美國 20 個城市的數(shù)字地圖上的遮擋道路上進(jìn)行了測試。它以 77% 的準(zhǔn)確率正確預(yù)測車道數(shù)量,以 93% 的準(zhǔn)確率預(yù)測道路類型。
也就是說,從互聯(lián)車輛收集傳感器數(shù)據(jù)不會消失。OEM 越來越依賴其車隊(duì)來收集用于創(chuàng)建數(shù)字地圖的新見解,隨著機(jī)器學(xué)習(xí)的進(jìn)步,這一過程變得越來越容易。HERE Technologies 最近推出了 UniMap,這是一種新的 AI 驅(qū)動技術(shù),用于更快地處理傳感器數(shù)據(jù)并創(chuàng)建地圖。新的解決方案可以有效地提取 2D 和 3D 格式的地圖特征,然后將它們與早期的地圖版本相結(jié)合。這種統(tǒng)一的地圖內(nèi)容數(shù)據(jù)模型允許在 24 小時內(nèi)提供新的數(shù)字地圖。

2. NDS.Live:從離線數(shù)據(jù)庫到分布式地圖數(shù)據(jù)系統(tǒng)
傳統(tǒng)的車載導(dǎo)航系統(tǒng)是設(shè)計(jì)、開發(fā)和集成專有數(shù)據(jù)庫的,這些數(shù)據(jù)庫在每一代新產(chǎn)品中都過時了。NDS.Live 是汽車生態(tài)系統(tǒng)中地圖數(shù)據(jù)新的全球標(biāo)準(zhǔn),促進(jìn)了從離線導(dǎo)航到混合/在線導(dǎo)航的過渡。它通過一個靈活的規(guī)范最大限度地減少了支持不同數(shù)據(jù)模型、存儲格式、接口和協(xié)議的復(fù)雜性。NDS.Live不是一個數(shù)據(jù)庫,而是一個分布式地圖數(shù)據(jù)系統(tǒng)。
NDS.Live 是由全球 OEM 和技術(shù)領(lǐng)導(dǎo)者共同開發(fā)的,包括 Intellias、戴姆勒、HERE、電裝、雷諾和 TomTom 等已經(jīng)采用它。例如,第二代梅賽德斯-奔馳用戶體驗(yàn) (MBUX) 系統(tǒng)由 NDS 提供支持。分布式地圖數(shù)據(jù)系統(tǒng)為駕駛員輔助系統(tǒng)提供了新的信息,這些信息在平視顯示器 (HUD) 上以增強(qiáng)現(xiàn)實(shí) (AR) 指令的形式可視化。NDS.Live 可以幫助大幅改善電動汽車和常規(guī)互聯(lián)汽車的導(dǎo)航體驗(yàn)。它還可以幫助 OEM 部署用于輔助駕駛和導(dǎo)航的增值訂閱。
3. 3D 和高精地圖生成
3D 地圖可以以 3D 形式準(zhǔn)確渲染物理對象。高清 (HD) 地圖包含有關(guān)道路特征(車道位置、道路邊界)和地形類型(曲線嚴(yán)重程度、路面坡度)的詳細(xì)信息。這兩種類型的地圖對于推出高級 ADAS 功能并最終迎來自動駕駛時代都是必不可少的。
3D 地圖定義了車輛的移動方式,并幫助它解釋從車載傳感器接收到的數(shù)據(jù)。由于大多數(shù)傳感器的范圍有限,高清地圖通過為導(dǎo)航系統(tǒng)提供有關(guān)道路特征、地形和其他交通相關(guān)對象的額外信息來提供幫助。
HD 和 3D 映射的瓶頸是收集和渲染數(shù)據(jù)。對于 3D 地圖,您需要從多個攝像頭實(shí)時捕獲視頻,規(guī)劃由于振動、溫度和硬件問題造成的干擾,然后在全球數(shù)十億公里的道路上重復(fù)該過程。移動出行企業(yè)和 OEM 不是單獨(dú)完成這項(xiàng)艱巨的任務(wù),而是聯(lián)手:
? 例如,HERE 和 Mobileye 合作,眾包高清地圖數(shù)據(jù)收集,大眾汽車后來也加入了進(jìn)來。Mobileye 開發(fā)了一種名為 EyeQ 的緊湊型高性能計(jì)算機(jī)視覺片上系統(tǒng)。該系統(tǒng)由 50 多家 OEM 的 300 種車型安裝,為 Mobileye 提供了充足的視覺數(shù)據(jù),然后他們可以在合作伙伴的幫助下將其渲染成地圖。
? 反過來,TomTom 與 Qualcomm Technologies 合作,從其用戶那里眾包高清地圖洞察。Qualcomm 提供了基于云的底層平臺,用于制作和維護(hù)來自各種來源的高清地圖,包括成群的互聯(lián)車輛。

4. 自動駕駛模擬
自動駕駛汽車需要進(jìn)行廣泛的道路和賽道測試才能通過安全檢查。制造商還需要模擬瀕臨碰撞事件,而不會將任何人置于危險之中。超逼真的虛擬世界可以成為自動駕駛汽車 (AV) 更安全的試驗(yàn)臺,尤其是在虛擬化技術(shù)進(jìn)步的情況下。
一組研究人員發(fā)布了一個開源的數(shù)據(jù)驅(qū)動型仿真引擎,用于為 AV 訓(xùn)練構(gòu)建逼真的環(huán)境。該引擎可以模擬復(fù)雜的傳感器類型,包括 2D RGB 攝像頭和 3D 激光雷達(dá),以及生成存在多輛車的動態(tài)場景。借助新引擎,用戶可以模擬超車和跟隨等復(fù)雜的駕駛?cè)蝿?wù)。
Waymo 采用了類似的方法,使用從車載攝像頭和傳感器收集的真實(shí)數(shù)據(jù)來創(chuàng)建高度詳細(xì)的虛擬測試臺。Waymo 團(tuán)隊(duì)已經(jīng)構(gòu)建了幾個十字路口的虛擬副本,這些十字路口的尺寸、車道、路緣和交通信號燈完全相同。在模擬過程中,Waymo 算法可以經(jīng)過訓(xùn)練,使用相同或不同的駕駛條件以及車隊(duì)中不同車輛,執(zhí)行最具挑戰(zhàn)性的交互數(shù)千次。
為了完善算法的性能,該團(tuán)隊(duì)使用了一種模糊測試技術(shù)。在培訓(xùn)課程期間,工程師會交替調(diào)整其他車輛的速度、紅綠燈時間以及是否存在之字形慢跑者和休閑騎行者。一旦 Waymo 算法學(xué)會了通過閃爍的黃色箭頭的特定十字路口的技巧,“技能”就會成為知識庫的一部分,與車隊(duì)中的每輛車共享。
新一代高保真 3D 環(huán)境可以使用來自不同傳感器類型的數(shù)據(jù)構(gòu)建,以有效地將材質(zhì)世界的所有細(xì)節(jié)傳達(dá)給算法。現(xiàn)有的 3D 視覺數(shù)據(jù)庫已經(jīng)包含交通標(biāo)志、路面標(biāo)記和道路紋理的真實(shí)細(xì)節(jié)。借助機(jī)器學(xué)習(xí)和深度學(xué)習(xí)算法,復(fù)雜的 ADAS/AD 場景可以模擬接近現(xiàn)實(shí)生活的條件。
5. 道路基礎(chǔ)設(shè)施的數(shù)字孿生
雖然 OEM 利用行車記錄儀數(shù)據(jù)收集來構(gòu)建更好的導(dǎo)航系統(tǒng),但運(yùn)輸管理人員使用相同的智能來實(shí)現(xiàn)道路基礎(chǔ)設(shè)施的數(shù)字化。數(shù)字孿生是物理資產(chǎn)或系統(tǒng)(如智能交通燈網(wǎng)絡(luò)或智能停車設(shè)施)的交互式虛擬表示。在實(shí)時數(shù)據(jù)的支持下,道路基礎(chǔ)設(shè)施的數(shù)字孿生可以實(shí)現(xiàn)高級城市規(guī)劃場景。這包括動態(tài)交通信號優(yōu)化以減少擁堵,以及優(yōu)先公共和服務(wù)運(yùn)輸管理和準(zhǔn)確的交通預(yù)測,以優(yōu)化規(guī)劃、標(biāo)牌、施工進(jìn)度等。
低延遲對于自動駕駛至關(guān)重要。然而,在邊緣生成 3D 地圖需要強(qiáng)大的計(jì)算能力。此外,車輛無法在其路線上存儲所有地圖數(shù)據(jù),并且需要不斷接收無線更新。一組研究人員提議在路邊放置緊湊的地圖分發(fā)設(shè)備,以方便在旅途中交付點(diǎn)云數(shù)據(jù) (PCD) 地圖。結(jié)果表明,自動駕駛汽車可以在下載 PCD 地圖時進(jìn)行自定位。該系統(tǒng)允許自動駕駛汽車接收每個新目的地的動態(tài)新地圖,而不是在車載上存儲大量數(shù)據(jù)記錄。
6. HUD 導(dǎo)航產(chǎn)品中的 AR
最新的車輛具有升級的人機(jī)界面 (HMI) 設(shè)計(jì),具有允許 AR 導(dǎo)航的新硬件和軟件元素。HUD 中的 AR 可以從靜態(tài)顯示器(行駛速度、ADAS 系統(tǒng)狀態(tài)、燃料或充電水平)以及動態(tài)路線指令(包括交通標(biāo)志、限速、施工警報和 ETA 信息)中提供所有標(biāo)準(zhǔn)信息。
總體而言,AR 導(dǎo)航系統(tǒng)可以幫助駕駛員在道路上做出更好的決策。最近的一項(xiàng)比較研究發(fā)現(xiàn),與使用傳統(tǒng) HUD 的駕駛員相比,使用 AR 增強(qiáng) HUD 的駕駛員犯的錯誤更少,平均駕駛速度也更快。參與者還將 AR HUD 說明評為更有用且更易于理解。
導(dǎo)航的下一個進(jìn)步將是全息顯示器,提供 3D AR 指令。激光雷達(dá)技術(shù)的進(jìn)步已經(jīng)允許將道路物體的超高清全息表示實(shí)時投影到駕駛員的視野中。據(jù) Tech Explore 稱,此類系統(tǒng)可以縮短障礙物可視化時間并減少與駕駛相關(guān)的壓力。
中國新時空服務(wù)體系呈現(xiàn)套娃形制架構(gòu)
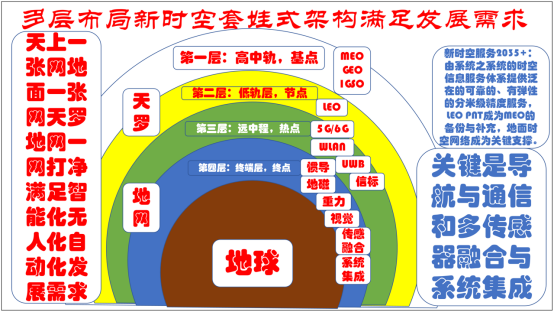
北斗導(dǎo)航向中國時空轉(zhuǎn)變是個大方向大趨勢大跨越,也就是從衛(wèi)星導(dǎo)航向泛在時空過渡,是一種順理成......
北斗全球衛(wèi)星導(dǎo)航系統(tǒng)的發(fā)展歷程

中國北斗,我國自主建設(shè)的衛(wèi)星導(dǎo)航系統(tǒng)。自1994年北斗一號立項(xiàng)以來,歷經(jīng)二十六載,從無到有......
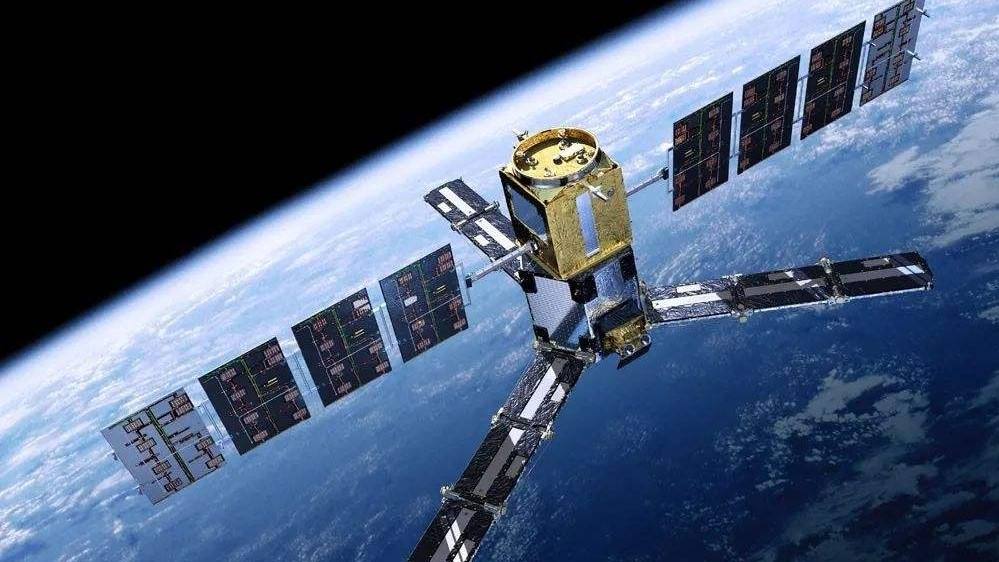
各新基建協(xié)同作用,助衛(wèi)星互聯(lián)網(wǎng)加速發(fā)展

近年來,我國在遙感測繪、定位導(dǎo)航、科學(xué)實(shí)驗(yàn)等中高軌道衛(wèi)星應(yīng)用領(lǐng)域取得了一系列重大成果,如風(fēng)......
據(jù)俄羅斯國家航天集團(tuán)公司中央機(jī)械制造科學(xué)研究所刊物《航天與火箭制造》登載的文章稱,該研究所......
中國衛(wèi)星導(dǎo)航系統(tǒng)應(yīng)用落地再加速 北斗不只是“導(dǎo)航”
幾乎是前后腳,中國北斗在過去一個月內(nèi)迎來兩則重磅消息。8月31日,來自中俄衛(wèi)星導(dǎo)航重大戰(zhàn)略......
北斗產(chǎn)業(yè)發(fā)展現(xiàn)狀與前景預(yù)測
展望未來30-50年,我們將以衛(wèi)星導(dǎo)航系統(tǒng)的時 空為基石,集成光學(xué)、聲學(xué)、電學(xué)、磁學(xué)、機(jī)......

2017年11月,北斗三號首批組網(wǎng)衛(wèi)星以“一箭雙星”方式成功發(fā)射入軌,截至目前已有16顆衛(wèi)......

據(jù)河南省測繪地理信息局網(wǎng)站消息,商丘市新建的13座北斗導(dǎo)航定位基準(zhǔn)站全部建成并通過省級驗(yàn)收......
深圳:應(yīng)用北斗系統(tǒng)優(yōu)化共享單車管理

近日,深圳市在南山區(qū)西麗街道、桃源街道、寶安區(qū)新安街道、西鄉(xiāng)街道啟動了共享單車高精度定點(diǎn)停......
智能車輛定位系統(tǒng)的關(guān)鍵技術(shù)是什么?

這似乎是個老問題,實(shí)際上也是個新問題。因?yàn)橹悄艿膯栴},現(xiàn)在與無人駕駛密切相關(guān),引出一堆新問......
 環(huán)球新時空
環(huán)球新時空 斗室智庫
斗室智庫