2016年12月21日 上午12:00:00
EMCORE 公司的特邀專欄作家謝爾蓋·佐托夫(Sergey Zotov)介紹了慣性等級分類中的不一致之處,以及為什么是時候對術語進行標準化了。
隨著慣性導航的蓬勃發展,慣性傳感器及其性能等級的多樣性得到了擴大。雖然存在一個全面的標準術語框架,包括軍用和民用指南(例如,IEEE 慣性傳感器術語標準),但它們在整個行業的采用和應用仍然不一致。這種不一致帶來了兩個主要挑戰:
1. 數據表示的異質性:在比較不同制造商的數據表時,可以很容易地觀察到表示和格式的明顯差異。這種異質性阻礙了有效的比較,使最終用戶的選擇過程變得繁瑣,并可能產生誤導。
2. 測試協議差異:即使有明確的指南,制造商和最終用戶在理解和應用方面也往往存在差異。由于對標準、術語和測試方法的解釋不一致,這導致最終用戶需要獨立驗證慣性傳感器。
此外,該行業最近見證了一個令人擔憂的趨勢:對戰術、高端戰術、導航和戰略等等級的基本術語的誤解,而誤解甚至往往被完全忽視。
鑒于這些持續的趨勢,很明顯,雖然現有標準發揮著根本性的作用,但需要一個更強大且普遍采用的頂級術語標準,清楚地記錄 INS/IMU 和慣性傳感器的戰術/導航/戰略等級。本標準不應存在有雙重解釋。

一、果然是慣性器件的它被叫成同一個名字
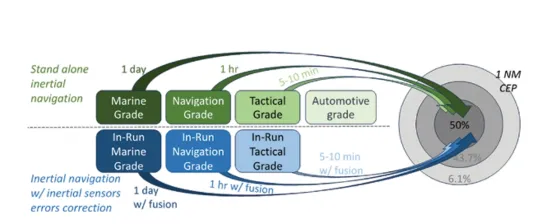
慣性系統的核心功能包括慣性測量單元(IMU)和慣性導航系統 (INS),是為導航問題提供獨立的解決方案。這涉及根據移動物體先前確定的位置和 INS 的輸出來計算移動物體的當前位置(速度)和姿態。這些系統自主解決導航問題的精度決定了它們的等級。定義慣性傳感器類的任何其他方法都可能導致混淆。因此,IMU 和 INS 以及相關的慣性傳感器分為四個不同的等級類別:航海、導航、戰術和汽車。
1. 航海級
目的和精度:航海級 INS 代表最高性能類別,旨在提供極其精確的獨立導航解決方案。它們在一天內保持小于 1 海里(約 1852 米)的誤差范圍。
應用:這些系統主要用于船舶、潛艇和特定航天器,對于需要高精度的長距離導航至關重要。
2. 導航級
標準合規性和精度:導航級 INS/IMU 必須符合 SNU 84 標準,該標準規定在運行的第一個小時內最大水平位置漂移為 1 海里(或在某些標準中約為 1.5 公里)。
應用:這些系統是商用客機和軍用飛機不可或缺的一部分,可確保安全高效的導航,尤其是在外部導航輔助設備可能受限的環境中。
3. 戰術級
短期精度:戰術級 IMU/INS 專為短期導航解決方案而設計,可在短時間內以 1 海里的誤差范圍提供精確制導,通常為幾到 10 分鐘。
通過集成擴展功能:雖然它們在長期準確性方面存在局限性,但將它們與 GPS、視覺或 LiDAR 等其他系統集成可以提高它們的實用性,從而擴展它們在各個領域的適用性。
子類別:還值得注意的是,戰術級可以進一步分為三個子類:低端戰術級、標準戰術級和高端戰術級。低端戰術級通常提供比標準戰術級低一個數量級的精度。相反,高端戰術等級,有時被稱為近導航或低端導航等級,在精度方面彌合了標準戰術等級和導航等級之間的差距。
4. 汽車級
有限的獨立功能:作為最低等級的 IMU,汽車級 IMU 不足以進行精確的獨立導航,但在與其他系統結合使用時非常有用。
其他應用:它們可用于姿態和航向參考系統(AHRS)、行人航位推算和其他輔助導航系統,為車輛技術做出了重大貢獻。
通過遵循這個基于導航精度的分類系統,我們可以更準確地評估各種 IMU 和 INS 的能力和局限性。這種方法簡化了為特定導航需求選擇正確系統的過程,并確保分類與這些系統的核心功能直接相關。因此,在確定慣性傳感器的類別時,直接和主要標準應該是它在自主導航系統中提供的精度水平。這種原始分類作為主要來源,為理解和分類慣性傳感器提供了一個清晰明確的框架。
二、是否需要其他等級?
在過去十年中,將慣性傳感器與校正器(如 LiDAR 和視覺里程計)結合使用的趨勢很明顯,但不包括 GPS 等確定絕對坐標的校正器。將 IMU 與非慣性傳感器融合可以校準大多數(但不是全部)傳感器誤差。例如,在理想情況下,慣性傳感器偏置可以校準到偏置不穩定性的水平,而 INS 姿態和位置誤差可以通過角度隨機游走 (ARW)、速度隨機游走 (VRW) 和偏置不穩定性的水平來確定。
因此,這種方法可以將汽車級 IMU 的導航解決方案提升到戰術級精度,或將戰術級 IMU 提升到導航級精度。IMU 與非慣性校正器融合時達到的最終精度主要取決于校正器和估計濾波器的質量(這不是本文討論的重點),但也取決于慣性傳感器本身的某些參數。
在這種情況下,建立新術語是有意義的。如果傳感器的參數(如 ARW、偏置不穩定性、VRW)在與非慣性校正器(不包括 GPS)融合時啟用慣性系統以達到一定水平的性能,那么我們可以將傳感器稱為具有“運行中 [特定等級]”的質量。例如,如果汽車級 IMU 與非慣性傳感器結合使用時,在 10 分鐘后達到 1 海里的精度,則該 IMU 可以稱為“運行中戰術級 IMU”。這種分類認可了傳感器融合帶來的增強功能,從而提供了傳感器在實際應用中性能的更細致入微的視圖。
三、結論
本文不介紹新信息,因為討論的所有細節都是公認的,并且在許多公共領域中很容易獲得。本文的主要目標有三個。首先,它鼓勵讀者參與現有的慣性導航標準,突出它們在慣性傳感器技術領域的重要性。其次,本文提請注意這樣一個事實,即有時這些標準沒有得到正確的解釋,從而導致應用和理解的不一致。最后,本文旨在發起一場關于定義傳感器等級的新標準的必要性的對話。通過提出這個問題,作者試圖在行業內引發深思熟慮的思考和討論,以完善和增強指導我們理解和使用慣性傳感器的標準。
作者:
謝爾蓋·佐托夫(Sergey Zotov)博士是EMCORE 研究員和首席科學家,在開發慣性導航產品方面擁有 20 年的經驗。他專門研究推進石英 MEMS 慣性傳感器的技術。此外,他還擁有同步定位和地圖構建 (SLAM)、計算機視覺和傳感器融合方面的專業知識。
注:該文譯自《Inside GNSS》。
北斗導航向中國時空轉變是個大方向大趨勢大跨越,也就是從衛星導航向泛在時空過渡,是一種順理成......

中國北斗,我國自主建設的衛星導航系統。自1994年北斗一號立項以來,歷經二十六載,從無到有......

近年來,我國在遙感測繪、定位導航、科學實驗等中高軌道衛星應用領域取得了一系列重大成果,如風......
據俄羅斯國家航天集團公司中央機械制造科學研究所刊物《航天與火箭制造》登載的文章稱,該研究所......
幾乎是前后腳,中國北斗在過去一個月內迎來兩則重磅消息。8月31日,來自中俄衛星導航重大戰略......
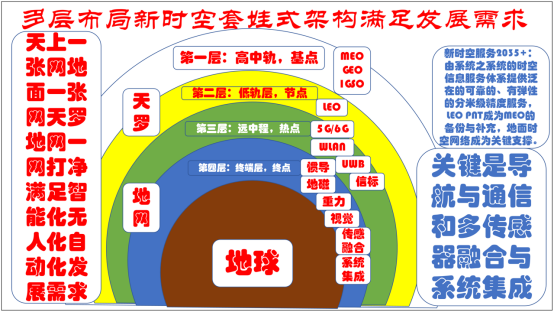
展望未來30-50年,我們將以衛星導航系統的時 空為基石,集成光學、聲學、電學、磁學、機......

2017年11月,北斗三號首批組網衛星以“一箭雙星”方式成功發射入軌,截至目前已有16顆衛......

據河南省測繪地理信息局網站消息,商丘市新建的13座北斗導航定位基準站全部建成并通過省級驗收......

近日,深圳市在南山區西麗街道、桃源街道、寶安區新安街道、西鄉街道啟動了共享單車高精度定點停......

這似乎是個老問題,實際上也是個新問題。因為智能的問題,現在與無人駕駛密切相關,引出一堆新問......
 環球新時空
環球新時空 斗室智庫
斗室智庫